જહાજ સફર પર નીકળે તે પહેલાં, કેપ્ટનના માર્ગદર્શન હેઠળ, નકશા અને નેવિગેશન એડ્સનો ઉપયોગ કરીને સમગ્ર આગામી માર્ગ માટે નેવિગેશન શરતોનો અભ્યાસ કરવામાં આવે છે. આ ડેટાના આધારે, કરો પૂર્વ બિછાવે. જો કે, તે માત્ર સંક્રમણ પરિસ્થિતિઓનો સામાન્ય ખ્યાલ આપે છે. સફર પર પ્રસ્થાનના ક્ષણથી, અભ્યાસક્રમોની અંતિમ પસંદગી અને ધ્યાનમાં લેવામાં આવેલા તમામ પરિબળો ચોક્કસ નેવિગેશન પરિસ્થિતિ દ્વારા નક્કી કરવામાં આવે છે. તેથી, ફ્લાઇટ દરમિયાન તેઓ હાથ ધરે છે એક્ઝિક્યુટિવ ગાસ્કેટ. તેમાં ડેડ રેકૉનિંગ, ગણતરીઓ અને નકશા પર કાવતરું, અન્ય જહાજોથી વિચલિત થવા માટે દાવપેચની ગણતરીનો સમાવેશ થાય છે.
મૃત ગણતરી દ્વારાદરિયાકાંઠાના સીમાચિહ્નો અને અવકાશી પદાર્થો (અવલોકનો) નું અવલોકન કર્યા વિના જહાજની ગતિ (ગતિ અને દિશા) ના ઘટકો અને જહાજ (ગણતરીયોગ્ય સ્થળ) ના કોઓર્ડિનેટ્સ નક્કી કરવા માટે બાહ્ય દળોના પ્રભાવનું સતત એકાઉન્ટિંગ છે. આ એકાઉન્ટિંગ જહાજના અભ્યાસક્રમ, ઝડપ અને ડ્રિફ્ટ વેક્ટરના મૂલ્યોના આધારે હાથ ધરવામાં આવે છે. નકશા પર ગણતરી માટે પ્રારંભિક બિંદુ કેપ્ટન દ્વારા નક્કી કરવામાં આવે છે. બંદરના પાણીમાંથી બહાર નીકળ્યા પછી તરત જ મેળવેલ જહાજની ચોક્કસ સ્થિતિ, લાઇટશિપ, રિસિવિંગ બોય વગેરેને આવા બિંદુ તરીકે લઈ શકાય છે. તેના કોઓર્ડિનેટ્સ જહાજના લોગમાં નોંધાયેલા છે. અમલ શરૂ થાય ત્યાં સુધીમાં, તમારે લોગ ચાલુ કરવો જોઈએ, ગોઠવણી સાથે હોકાયંત્ર સુધારણા નક્કી કરવી જોઈએ અથવા બીજી રીતે.
ડ્રિફ્ટ અને કરંટ વિના સ્વિમિંગ કરતી વખતે ગણતરી કરવી. જ્યારે ડ્રિફ્ટ અને કરંટ વિના સફર કરતા હોય ત્યારે, નકશા પર વહાણની પાથ લાઇન IR લાઇન સાથે એકરુપ હોય છે, તેથી, નકશા પર વહાણની હિલચાલને IR રેખાઓ સાથે ધ્યાનમાં લેવામાં આવે છે, જેની સાથે લોગ સાથે જહાજ દ્વારા મુસાફરી કરવામાં આવેલ અંતરનું આયોજન કરવામાં આવે છે. , તેના ગુણાંકને ધ્યાનમાં લેતા Cl. નકશા પર પ્રારંભિક બિંદુથી પ્રથમ અભ્યાસક્રમ રેખા દોરવામાં આવે છે. કાર્ડમાંથી લેવામાં આવેલ IR CC માં ટ્રાન્સફર કરવામાં આવે છે, જેના પર તે ચુંબકીય હોકાયંત્ર અનુસાર મૂકવામાં આવે છે. IR લાઇનની ઉપરના નકશા પર હોકાયંત્રનો કોર્સ અને તેનું કરેક્શન દર્શાવેલ છે. કોર્સ સાથે અંતર મુસાફરી ક્રઅંતર દ્વારા નિર્ધારિત:
Sl = Cl (ol2 - ol1); (જ્યાં ol2 ol1 Cl- લેગ ગુણાંક).
IR લાઇન પર, નીચે દર્શાવેલ કેસોમાં, વહાણની સંખ્યા ચિહ્નિત થયેલ છે, એટલે કે, કોર્સ અને નેવિગેશન અનુસાર ગણતરી કરેલ સ્થળ. જો દરિયાકાંઠાની નજીક સફર હાથ ધરવામાં આવે છે, તો દર કલાકે ગણતરીપાત્ર બિંદુઓ ચિહ્નિત કરવામાં આવે છે; ખુલ્લા સમુદ્રમાં - ઘડિયાળના અંતે. વધુમાં, ગણતરીપાત્ર સ્થળ વળાંકની શરૂઆત અને અંતના બિંદુઓ પર લાગુ કરવામાં આવે છે, જ્યારે ઝડપ બદલાતી હોય ત્યારે, અવલોકનો પ્રાપ્ત કરતી વખતે. વહાણના સ્થાનની નજીક, ક્ષણને વહાણની ઘડિયાળ પર 1 મિનિટ (T) ની ચોકસાઈ સાથે અને 0.1 માઈલ (ol) ની ચોકસાઈ સાથે લોગ રીડિંગ સાથે અપૂર્ણાંકના રૂપમાં રેકોર્ડ કરવામાં આવે છે. (જુઓ આકૃતિ 31).
દરિયાઈ નેવિગેશનની વાસ્તવિક પરિસ્થિતિઓમાં, ત્રણ મુખ્ય વિકલ્પો શક્ય છે, જે યાટના પાથને મૃત ગણવાની અનુરૂપ વ્યવહારિક પદ્ધતિઓ નક્કી કરે છે:
- સ્થિર સંપૂર્ણ પવનની સ્થિતિમાં વહાણ;
- સ્થિર પવનની સ્થિતિમાં સઢવાળી;
- તાકાત અને દિશામાં અસ્થિર હોય તેવા પવનમાં સફર.
પ્રથમ કિસ્સામાં, યાટ સામાન્ય રીતે પ્રારંભિક બિછાવે દરમિયાન નાખેલા માર્ગ સાથે દોરી જાય છે. અહીં ગણતરીની પરિસ્થિતિઓ અનુકૂળ છે. બીજા કિસ્સામાં, સામાન્ય અભ્યાસક્રમની તુલનામાં એક ટેક કરવામાં આવે છે, જ્યારે દરેક ટેક પર નાખવામાં આવેલ વાસ્તવિક પાથ પ્રારંભિક બિછાવે સાથે મેળ ખાતો નથી. જો ટેકિંગ ટેક ખૂબ ઊભો ન હોય, તો હેલ્મ્સમેન આપેલ કોર્સને ચોક્કસ રીતે જાળવી રાખે છે, જે ડેડ રેકનીંગને સરળ બનાવે છે અને તેની ચોકસાઈ વધારે છે. આવી પરિસ્થિતિઓમાં, ટેક્સનો સમયગાળો ટેકિંગ એંગલ (સામાન્ય કોર્સ અને યાટના પાથ વચ્ચેનો કોણ) પર આધાર રાખે છે. જો જમણી અને ડાબી ટેક્સના ખૂણા સમાન હોય, તો તેમની અવધિ સમાન હોય છે, અને ટેકિંગ સપ્રમાણ હોઈ શકે છે. જો નહિં, તો ઇન્સ્ટ્રુમેન્ટ ડેટા અનુસાર દરેક ચોક્કસ ટેકિંગ ટેક પર ડેડ રેકનિંગ અને ટ્રેક લેઇંગ કરવામાં આવે છે. જો ત્યાં કોઈ અંતર નથી, તો દરેક ટેક પર ઝડપનું મૂલ્યાંકન કરવાની ભલામણ કરવામાં આવે છે.
ટેક કરતી વખતે, એવું બની શકે છે કે હેલ્મ્સમેન, યાટ કપ્તાનની સૂચનાઓ પર, પવનમાં જતી વખતે હોકાયંત્ર પર ધ્યાન આપતો નથી. અહીં, સમયના નાના પરંતુ સમાન અંતરાલ (15 - 30 મિનિટ) પછી, સરેરાશ QC અને અનુરૂપ IC નક્કી કરવામાં આવે છે અને રેકોર્ડ કરવામાં આવે છે, જે મુજબ લેગ અથવા સ્પીડ દ્વારા મેળવેલ ડેટા સંગ્રહિત થાય છે. અસ્થિર પવનમાં, હેલ્મસમેનને કોર્સ આપવામાં આવતો નથી, પરંતુ સામાન્ય કોર્સની શક્ય તેટલી નજીક રાખીને પવનની શોધમાં સઢ સાથે સ્ટીયરિંગ કરવાનું કાર્ય આપવામાં આવે છે. કેટલીકવાર આવી પરિસ્થિતિમાં, સ્થાનિક સંકેતો અને હવામાનની આગાહીના આધારે, સંપૂર્ણ સ્થિર પવન વહેલા (ઉદાહરણ તરીકે, અપતટીય પવન) મેળવવા માટે સામાન્ય માર્ગમાંથી વિચલિત થવું ફાયદાકારક હોઈ શકે છે. આ તમામ કેસોમાં, મૃત ગણતરીના હિતમાં, યાટ પરના તમામ વળાંક રેકોર્ડ કરવામાં આવે છે અને દરેક ટેક પર (ટેકની શરૂઆતમાં અને અંતે તે ફરજિયાત છે) ચોક્કસ આવર્તન સાથે (કલાકમાં 1-2 વખત, તેના આધારે શરતો) વહાણની હિલચાલ પરનો ડેટા (સમય, મથાળું) રેકોર્ડ કરવામાં આવે છે, ઝડપ, લેગ ગણતરી). આ રેકોર્ડ દરેક ટેકના અભ્યાસક્રમ અને ઝડપની સરેરાશ દ્વારા પ્રક્રિયા કરવામાં આવે છે, અને પછી ચાર્ટ પર પ્લોટ કરવામાં આવે છે.
પ્રેક્ટિસ બતાવે છે કે આવી પરિસ્થિતિઓમાં મૃત ગણતરીની ચોકસાઈ અવલોકનોની વધતી જતી વિવેકબુદ્ધિ સાથે વધે છે. સ્વિમિંગના વક્ર વિભાગોને રેક્ટીલીનિયર સુધી પહોંચાડવામાં ભૂલો અન્ય ભૂલોની તુલનામાં નજીવી હશે.
ડ્રિફ્ટ ઓફ ધ શિપ.ડ્રિફ્ટ દ્વારા નેવિગેશનમાં ( "એ")ને પવન અને તેના કારણે થતા તરંગોની સંયુક્ત ક્રિયા હેઠળ કોર્સ લાઇનમાંથી વહાણનું ડ્રિફ્ટ કહેવામાં આવે છે. વહાણ કરતી વખતે, વહાણના એન્જિન અને પવનની સંયુક્ત ક્રિયા હેઠળ જહાજ પાણીની તુલનામાં આગળ વધે છે. તેની વાસ્તવિક હિલચાલની રેખા (OM), જેને ડ્રિફ્ટ દરમિયાન જહાજનો ટ્રેક કહેવામાં આવે છે, તે જહાજના માર્ગ (OA) સાથે સુસંગત નથી. (જુઓ આકૃતિ 33). જ્યારે ટ્રેક લાઇન જમણી તરફ શિફ્ટ થાય છે ડીપીજહાજ (બંદર પર પવન ફૂંકાય છે) aવત્તાનું ચિહ્ન (+) અસાઇન કરવામાં આવે છે, અને જ્યારે ડાબી તરફ જાય છે (પવન સ્ટારબોર્ડની બાજુએ ફૂંકાય છે) - બાદબાકીનું ચિહ્ન (-). ડ્રિફ્ટને ધ્યાનમાં લેતા ટ્રેક એંગલ વચ્ચેની અવલંબન ( PUa), આઈઆરઅને a:
PUa = IR + a; IR = PUa - a ; a = PUa - IR

અવલોકનોમાંથી મેળવેલા જહાજના વાસ્તવિક માર્ગની સરખામણી કરીને ડ્રિફ્ટ એંગલ નક્કી કરી શકાય છે. આઈઆર. દરિયાકાંઠાને અનુસરતી વખતે, સંખ્યાબંધ વિશ્વસનીય નેવિગેશનલ અવલોકનો હાથ ધરવામાં આવે છે. અવલોકન કરેલ બિંદુઓને જોડીને, વહાણની વાસ્તવિક હિલચાલની એક રેખા પ્રાપ્ત થાય છે, એટલે કે, ડ્રિફ્ટ દરમિયાન પાથની રેખા. PUa(ફિગ. 34). ટ્રેક લાઇન અને નકશા પર દોરેલી રેખા વચ્ચેનો ખૂણો આઈઆરડ્રિફ્ટ એંગલને અનુરૂપ છે. તેની નિશાની સાથે મળેલ ડ્રિફ્ટ એંગલને આગળની ગણતરીઓમાં ધ્યાનમાં લેવામાં આવે છે. જો નેવિગેશન એરિયામાં પ્રવાહ હોય, તો પરિણામી ડ્રિફ્ટ એંગલ માત્ર પવનના જ નહીં, પણ વર્તમાનના જહાજ પરના પ્રભાવનું પરિણામ હશે.
ગણતરીમાં ડ્રિફ્ટ માટે એકાઉન્ટિંગ.જો વહાણ વહી રહ્યું હોય, તો જ્યારે કાવતરું ઘડવામાં આવે છે, ત્યારે ડ્રિફ્ટ દરમિયાન વહાણના પાથની રેખા નકશા પર રચવામાં આવે છે. તેઓ તેના પર લખે છે QC, હોકાયંત્ર સુધારણા અને ડ્રિફ્ટ એન્ગલને ધ્યાનમાં લેવામાં આવે છે aતમારી નિશાની સાથે. લોગ સાથે મુસાફરી કરેલ અંતર પાથ લાઇન સાથે રચાયેલ છે. ક્ર. એવું માનવામાં આવે છે કે જ્યારે a
Sl = Cl (ol2 - ol1); (જ્યાં ol2- જ્યાં વહાણ સ્થિત છે ત્યાં લોગની ગણતરી કરવી, ol1- પ્રારંભિક બિંદુ પર વિલંબની ગણતરી, Cl- લેગ ગુણાંક).
જો નેવિગેટરને ડ્રિફ્ટ એંગલની ચોકસાઈ વિશે ખાતરી ન હોય, તો નેવિગેશન સલામતીને નિયંત્રિત કરવા માટે, ડ્રિફ્ટ લાઇન ઉપરાંત, નકશા પર એક રેખા દોરવાની ભલામણ કરવામાં આવે છે. આઈઆર. આ બંને રેખાઓ પાણીની અંદરના અવરોધોના સંબંધમાં સ્પષ્ટ હોવી જોઈએ. ગણતરી ફક્ત તે જ ટ્રેક પર કરવામાં આવે છે જેની સાથે જહાજ આગળ વધે છે.
સી કરન્ટ્સ. દરિયાઈ પ્રવાહોપાણીના મોટા જથ્થાની આડી હિલચાલ કહેવામાં આવે છે. પ્રવાહ તેના તત્વો દ્વારા વર્ગીકૃત થયેલ છે: દિશા અને ગતિ. વર્તમાન દિશા સીટીપરિપત્ર ગણતરી અનુસાર અથવા સંદર્ભ બિંદુઓમાં ડિગ્રીમાં સૂચવવામાં આવે છે અને ક્ષિતિજ પરના બિંદુ અનુસાર સેટ કરવામાં આવે છે કે જેના તરફ પ્રવાહ નિર્દેશિત થાય છે. વર્તમાન ઝડપ વી.ટીગાંઠોમાં માપવામાં આવે છે, અને તેની નાની ઝડપ દરરોજ માઇલમાં માપવામાં આવે છે. પ્રવાહની પ્રકૃતિ અનુસાર, તેઓને સ્થિરમાં વર્ગીકૃત કરવામાં આવે છે, જેનાં ઘટકો ભાગ્યે જ વર્ષ-દર વર્ષે બદલાતા રહે છે, સામયિક, જેનાં તત્વો ચોક્કસ કાયદા અનુસાર બદલાય છે, અને અસ્થાયી (રેન્ડમ), જેનાં તત્વો બદલાઈ શકે છે. તીવ્રપણે વ્યવહારમાં, નેવિગેટરને મોટાભાગે સતત અને સામયિક (ભરતી) પ્રવાહોનો સામનો કરવો પડે છે. સતત અને ભરતી પ્રવાહોના તત્વો વિશેની માહિતી સઢવાળી દિશાઓ, વર્તમાન એટલાસ અને નકશા પર મૂકવામાં આવે છે. આ કિસ્સામાં, પ્રવાહ તત્વોના સરેરાશ મૂલ્યો સૂચવવામાં આવે છે, જે વાસ્તવિક કરતાં નોંધપાત્ર રીતે અલગ હોઈ શકે છે. વર્તમાનમાં સફર કરતી વખતે જમીનની સાપેક્ષમાં વહાણની હિલચાલ નીચેના પરિબળો દ્વારા નક્કી કરવામાં આવે છે (ફિગ. 36).

જહાજના એન્જિનના પ્રભાવ હેઠળ, વહાણ પાણીની તુલનામાં તેની દિશામાં આગળ વધે છે ડીપી, એટલે કે, સાચા અભ્યાસક્રમ OA ની રેખા. પાણીની સાપેક્ષમાં વહાણની ગતિ એ ઝડપ છે વી.એલલેગ દ્વારા દર્શાવવામાં આવ્યું છે. તે જ સમયે, પાણીના સમગ્ર સમૂહ સાથે, જહાજને પ્રવાહની ગતિએ ODની દિશામાં જમીનની સાપેક્ષે દૂર લઈ જવામાં આવે છે. વી.ટી. પરિણામે, જમીનની સાપેક્ષે, વહાણ પરિણામી OB સાથે એવી ઝડપે આગળ વધે છે જેને વહાણની સાચી ગતિ કહેવાય છે. વી. જેમાં ડીપીજહાજ રેખાની સમાંતર રહે છે આઈઆર. રેખા OB કે જેની સાથે વહાણ જહાજના એન્જિન અને પ્રવાહની સંયુક્ત ક્રિયા હેઠળ આગળ વધે છે તેને પ્રવાહ પર વહાણના માર્ગની રેખા કહેવામાં આવે છે. ટ્રૅક લાઇનની સાચા મેરિડીયનની સ્થિતિ NOB એંગલ દ્વારા નક્કી કરવામાં આવે છે, જેને વર્તમાન પરનો કોર્સ એંગલ કહેવામાં આવે છે. પુ. કોર્નર "" , જહાજ OA ની સાચી કોર્સ લાઇન અને ટ્રેક લાઇન OB વચ્ચે બંધ હોય, તેને પ્રવાહનો ડ્રિફ્ટ એંગલ કહેવામાં આવે છે. જ્યારે વહાણ તેની જમણી તરફ વળે છે ડીપી(પ્રવાહ ડાબી બાજુએ નિર્દેશિત થાય છે) "+" ચિહ્ન સોંપવામાં આવે છે, અને જ્યારે ડાબી તરફ વહી જાય છે ત્યારે - "-" ચિહ્ન. વચ્ચે અવલંબન ( પુ), આઈઆરઅને:
PU = IR + ; IR = PU - ; = PU - IR
વર્તમાન સાથે સ્વિમિંગ કરતી વખતે ગણતરી.સતત પ્રવાહમાં સફર કરતી વખતે, વહાણનો માર્ગ કે જેના પર તે વાસ્તવમાં જમીનની સાપેક્ષે આગળ વધે છે તે નકશા પર દોરવામાં આવે છે. પાથ લાઇનની ઉપર એક શિલાલેખ છે QC, તમારા ચિહ્ન સાથે હોકાયંત્ર સુધારણા અને ડ્રિફ્ટ એંગલ. સહાયક ગણતરીઓ માટે, એક પાતળી રેખા પણ દોરવામાં આવે છે આઈઆર, જેનો ઉપયોગ અંતરના પ્લોટ માટે થાય છે ક્રલોગ રીડિંગ્સ અનુસાર પાણીની તુલનામાં વહાણ દ્વારા પસાર થાય છે. લાઇન પર પ્રાપ્ત પોઈન્ટ આઈઆર, ટ્રેક લાઇન (ફિગ. 37) પર પ્રવાહની દિશામાં સ્થાનાંતરિત. ટ્રેક લાઇન પર ગણતરીપાત્ર બિંદુઓ પર, સમય અને લેગ ગણતરી ચિહ્ન બનાવવામાં આવે છે, અને કોર્સ લાઇન પર અનુરૂપ બિંદુઓ પર - માત્ર લેગ ગણતરી. સીમાચિહ્નોના ટ્રાવર્સ, ઓપનિંગ અને છુપાવવાના બિંદુઓ ટ્રેક લાઇન પર ચિહ્નિત થયેલ છે (ફિગ. 38).


ડ્રિફ્ટ અને કરંટના સંયુક્ત એકાઉન્ટિંગ સાથેની ગણતરી.ચાલો કેસને ધ્યાનમાં લઈએ જ્યારે વહાણ જહાજના એન્જિન, પવન અને પ્રવાહની સંયુક્ત ક્રિયા હેઠળ જમીનની સાપેક્ષે આગળ વધે છે. મૃત ગણતરી હાથ ધરવા માટે, ડ્રિફ્ટ અને કરંટ દરમિયાન વહાણના માર્ગની રેખા નકશા પર નાખવામાં આવે છે અને કોતરવામાં આવે છે. QC, હોકાયંત્ર સુધારણા અને કુલ ડ્રિફ્ટ એંગલ
c = a + .
આ ઉપરાંત, સહાયક ગણતરીઓ માટે, નકશા પર ડ્રિફ્ટ ટ્રેક લાઇન પણ નાખવામાં આવે છે, જેની સાથે લોગ સાથે જહાજનું નેવિગેશન વિલંબિત થાય છે. ક્ર. ડ્રિફ્ટ દરમિયાન ટ્રેક પરનો દરેક બિંદુ વહાણની વાસ્તવિક હિલચાલની રેખા પરના બિંદુને અનુરૂપ છે. આ બિંદુઓ ફ્લો વેક્ટર દ્વારા એકબીજા સાથે જોડાયેલા છે. ગ્રાફિકલી, ડ્રિફ્ટ અને વર્તમાન, સાચી ઝડપ દરમિયાન નકશા પર ટ્રેક લાઇન શોધવા સંબંધિત કાર્યો વીઅને કુલ ડ્રિફ્ટ એંગલ સાથેઆપેલ મુજબ QC, વી.એલ, a, અને ફ્લો એલિમેન્ટ્સ, નંબર સ્થળનું પ્લોટિંગ, સમયની પૂર્વ ગણતરી અને olઆગમન સમયે આપેલ બિંદુ, સીમાચિહ્નનું એબીમ શોધીને, તેઓ તે જ રીતે નક્કી કરે છે જેમ કે પ્રવાહ પર સફર કરતી વખતે, પરંતુ તમામ સહાયક રચનાઓ ટ્રેક લાઇન પર બનાવવામાં આવે છે જ્યારે વહેતી વખતે, લાઇનને બદલીને. આઈઆર.
સંચયની ચોકસાઈના અંદાજો.બિનહિસાબી ભૂલોની અસરના પરિણામે, વહાણનો વાસ્તવિક માર્ગ અને મુસાફરી કરેલ અંતર (સફર) નકશા પર ગણતરી કરતી વખતે ધ્યાનમાં લેવામાં આવેલા લોકોને અનુરૂપ રહેશે નહીં, અને વહાણની વાસ્તવિક સ્થિતિ ગણતરીને અનુરૂપ રહેશે નહીં. એક ગણતરીમાં ભૂલો વિશે અંદાજિત નિર્ણય લેવા માટે, તમે નીચેના ડેટાનો ઉપયોગ કરી શકો છો, જે નેવિગેશનના સંચિત સામાન્ય અનુભવ અને હાથ ધરવામાં આવેલા સંશોધનને પ્રતિબિંબિત કરે છે. સફરનો સમયગાળો (કલાકો) રેડિયલ રુટ સરેરાશ ચોરસ ભૂલને અનુરૂપ છે, % થી એસ:
3 કલાક સુધી - 10%; 3-6h - 9%; 6-10h - 8%; 10-14h - 7%; 14-18h - 6%; 18-23h - 5%; 23-25h - 4%; 35 કલાકથી વધુ - 3%.
નેવિગેશનલ જોખમોથી ચોક્કસ અંતરે નકશા પર વહાણના પાથનું કાવતરું કરતી વખતે, રૂટ લાઇનથી વહાણ ભટકવાની સંભાવનાને ધ્યાનમાં લેવી જરૂરી છે, અને વિચલનનું મૂલ્ય વધતા અંતર સાથે વધશે, ખાસ કરીને જ્યારે વહાણમાં પ્રવાહ અને પ્રવાહ સાથે. અપૂરતી મૃત ગણતરીની ચોકસાઈને વહાણના સ્થાન પર વધારાના નિયંત્રણની આવશ્યકતા છે, એટલે કે, તેનું સ્થાન માત્ર મૃત ગણતરી દ્વારા જ નહીં, પણ અવલોકનો દ્વારા પણ નક્કી કરવું: નેવિગેશનલ, ખગોળશાસ્ત્રીય અથવા GPS નો ઉપયોગ કરીને.
સઢવાળી વખતે, વહાણ બે વાતાવરણની સરહદ પર હોય છે - હવા અને પાણી, જેની હિલચાલ તેને અસર કરે છે, તેને અભ્યાસક્રમથી વિચલિત કરે છે અને તેની ગતિમાં ફેરફાર કરે છે.
પવન દ્વારા વહાણની હિલચાલને ડ્રિફ્ટ કહેવામાં આવે છે. પવન એ હવાની જનતાની આગળની ગતિ છે. પવનની દિશા એ દિશા (ડિગ્રીમાં) છે જ્યાંથી પવન ફૂંકાય છે. પવનની ગતિ મીટર પ્રતિ સેકન્ડ અથવા પોઈન્ટમાં માપવામાં આવે છે.
ફિગ.1
V0 એ તેના પોતાના પ્રોપલ્સર્સ (ફિગ. 1) ની કામગીરીને કારણે, પાણીની તુલનામાં વહાણની ગતિ છે. વહાણની હિલચાલ માટે હવાના પ્રતિકારને વહાણ પરના નિરીક્ષક દ્વારા હવાના કાઉન્ટર ફ્લો તરીકે જોવામાં આવે છે, જેનો વેગ વેક્ટર (-V0) છે. ચાલો તમે સાચા પવનની ગતિ વેક્ટર બનો. હવા અને સાચા પવનનો કાઉન્ટરફ્લો, આગળ વધીને, ચાલતા જહાજ પર અવલોકન કરાયેલ કુલ પ્રવાહ બનાવે છે અને તેને સ્પષ્ટ (અવલોકન કરેલ) પવન કહેવામાં આવે છે. સ્પષ્ટ પવનની ગતિ વેક્ટર ભૌમિતિક સરવાળો સમાન છે:
W = u + (-V0) = u - V0.
સ્પષ્ટ પવનની ગતિ એનિમોમીટરનો ઉપયોગ કરીને અથવા મેન્યુઅલી એનિમોમીટરનો ઉપયોગ કરીને આપમેળે નક્કી કરવામાં આવે છે, KW દિશા એનિમોમીટર દ્વારા અથવા ધ્વજ અથવા પેનન્ટની દિશામાં નક્કી કરવામાં આવે છે. દેખીતો પવન. વહાણ પર મથાળાના કોણ qW પર કાર્ય કર્યા વિના, તે વહાણના સઢની મધ્યમાં લાગુ કુલ એરોડાયનેમિક બળ Pનું કારણ બને છે. સુપરસ્ટ્રક્ચરના રીફ્રેક્ટિવ ગુણધર્મોને લીધે, સામાન્ય કિસ્સામાં બળ P ની ક્રિયાની દિશા સ્પષ્ટ પવનની દિશા સાથે મેળ ખાતી નથી. બળ P ના પ્રભાવ હેઠળ, વહાણ આ બળની દિશામાં ડ્રિફ્ટ સ્પીડ VDR સાથે આગળ વધે છે.
ચાલો વેગ VDR ને કેન્દ્ર સમતલ સાથે VDR X અને બીમ સાથે VDR Y માં વિઘટન કરીએ. ઝડપ VDR X, સ્પષ્ટ પવનની દિશાના આધારે, બાદબાકી કરવામાં આવે છે અથવા ઝડપ V0 માં ઉમેરવામાં આવે છે. જો લેગ કામ કરે છે, તો તે આ ઝડપને ધ્યાનમાં લે છે. એ કારણે
Vl = V0 + VDR X.
VDR Y ઝડપ આપેલ કોર્સમાંથી જહાજને વિચલિત કરે છે. VDR Y ની ઝડપ સાથે વહાણ Vl ની ઝડપ ભૌમિતિક રીતે ઉમેરીને, અમે વહાણની વાસ્તવિક, અથવા જમીનની ગતિનો વેક્ટર V મેળવીએ છીએ:
V = Vl + VDR Y.
જેમ તમે જોઈ શકો છો, Vl અને VDR Y વેગ ઉમેરતી વખતે, વહાણ તેમના પરિણામની દિશામાં આગળ વધે છે.
વહાણ જે રેખા સાથે વાસ્તવમાં પ્રોપલ્શન અને દેખીતા પવનના પ્રભાવ હેઠળ સમુદ્રના તળિયાની સાપેક્ષે આગળ વધે છે તેને ડ્રિફ્ટ લાઇન કહેવામાં આવે છે. વહાણનું ડાયમેટ્રાલ પ્લેન, જ્યારે ટ્રેક સાથે આગળ વધે છે, ત્યારે સાચી કોર્સ લાઇનની સમાંતર રહે છે. આ એ હકીકતને કારણે છે કે હેલ્મમેન સતત આપેલ સાચા અભ્યાસક્રમને જાળવી રાખે છે. પરિણામે, વહાણ તેના ધનુષ્ય વડે નહીં, પણ તેના ખડકા સાથે ટ્રેક પર આગળ વધે છે.
સાચા મેરિડીયનના ઉત્તરીય ભાગ અને ડ્રિફ્ટ દરમિયાન ટ્રેક લાઇન વચ્ચેના સાચા ક્ષિતિજના પ્લેનમાંના કોણને PU ના ડ્રિફ્ટ દરમિયાન ટ્રેક એંગલ કહેવામાં આવે છે?.
ડ્રિફ્ટ દરમિયાન ટ્રુ કોર્સ અને પાથની રેખાઓ વચ્ચેના સાચા ક્ષિતિજના સમતલમાંના કોણને ડ્રિફ્ટ એંગલ કહેવામાં આવે છે?. જો જહાજની ડાબી બાજુએ પવન ફૂંકાઈ રહ્યો હોય, તો ડ્રિફ્ટ એંગલ પોઝિટિવ હોય છે (ડ્રિફ્ટ દરમિયાન હેડિંગ એંગલ સાચા મથાળા કરતાં વધારે હોય છે). જ્યારે પવન સ્ટારબોર્ડ બાજુથી હોય છે, ત્યારે ડ્રિફ્ટ એંગલ ઋણ હોય છે (ડ્રિફ્ટ દરમિયાન ટ્રેક એંગલ સાચા કોર્સ કરતા ઓછો હોય છે).
ડ્રિફ્ટ એંગલ દેખીતી પવનની ઝડપ અને હેડિંગ એંગલ, વહાણની ઝડપ અને ડિઝાઇન સુવિધાઓ પર આધાર રાખે છે: સુપરસ્ટ્રક્ચરની ઊંચાઈ અને આર્કિટેક્ચર, હલની સપાટી અને હલના રૂપરેખાનો આકાર. ડ્રિફ્ટ એન્ગલ ડ્રિફ્ટ મીટરનો ઉપયોગ કરીને માપવામાં આવે છે. આ ઉપકરણની ગેરહાજરીમાં, પ્રાયોગિક ડેટામાંથી સંકલિત ડ્રિફ્ટ ટેબલમાંથી વિવિધ સઢવાળી પરિસ્થિતિઓ માટે ડ્રિફ્ટ એંગલ પસંદ કરવામાં આવે છે. ફિગમાંથી. 1 દૃશ્યમાન:
સૂત્રો - બીજગણિત, કોણ? તેની નિશાની સાથે આવે છે.
નેવિગેશનની પ્રેક્ટિસમાં, વ્યક્તિએ વહાણના પ્રવાહને લગતી મુખ્યત્વે બે સમસ્યાઓ હલ કરવી પડે છે. સીધું કાર્ય:
જ્યારે લોન્ચર ડ્રિફ્ટ થાય ત્યારે ટ્રેક એંગલની ગણતરી કરો? (વહાણ કરતી વખતે વહાણના માર્ગની લાઇન), જો સાચો માર્ગ સ્પષ્ટ કરેલ હોય.
આ સમસ્યાને હલ કરવા માટે તમારે આની જરૂર પડશે:
- ડ્રિફ્ટ એંગલની નિશાની નક્કી કરો?;
- દેખીતા પવનના મથાળાના કોણ qW ની ગણતરી કરો;
- કોણ માપ પસંદ કરો? દલીલો દ્વારા ડ્રિફ્ટ ટેબલમાંથી: શિપ સ્પીડ અને qW દ્વારા;
— જ્યારે લૉન્ચર વહેતું હોય ત્યારે ટ્રેક એંગલની ગણતરી કરો?, નકશા પર ટ્રેક લાઇન દોરો.
CC = 79.0°; Vl = 12.0 ગાંઠ;
?GK = + 1.0°; પવન 5° -12 m/s.
ઉકેલ:
જહાજની ડાબી બાજુએ પવન ફૂંકાય છે - કોણ? હકારાત્મક:
IR = CC + ?GC = 80.0°;
? = +4.0°; પુ? = IR + ? = 84.0°.
2. જો રેડિયો બીકન નકશાની ફ્રેમની પૂર્વી અથવા પશ્ચિમી સરહદોની બહાર સ્થિત હોય તો સાચા રેડિયો બેરિંગ્સ મૂકવા.
નિર્ધારિત બિંદુ (બિંદુ M') ની સ્થિતિ શોધવા માટે કે જેના દ્વારા KRMK (બિંદુ A) પર રેડિયો બેરિંગ હાથ ધરવામાં આવશે, તે જરૂરી છે:
1) ? "RTSNO" માંથી KRMKA (?A, ?A) ના કોઓર્ડિનેટ્સ લખો;
2) ? મૂલ્યની ગણતરી કરો? ? = ?P – ?A, ક્યાં?P એ નકશાની બાજુની ફ્રેમનું રેખાંશ છે;
3) ? નકશા પર KRMKA (?A– માંથી "RTSNO") ની સમાંતર દોરો અને સેગમેન્ટને પ્લોટ કરો;
4) ? બિંદુ A" દ્વારા વધારાના મેરિડીયન aa દોરો;
5) ? બિંદુ A' થી લોક હાથ ધરે છે. P KRMKA A થી આંતરછેદ સાથે aa - t. M;
6) ? બિંદુ M થી aa સાથે, એક સેગમેન્ટને બાજુ પર રાખો અને, પરિણામી બિંદુ M’ દ્વારા, KRMK A પર રેડિયો બેરિંગ હાથ ધરો? આ ઇચ્છિત સ્થિતિ રેખા (I-I) હશે.
શીર્ષક, ગતિ, ડ્રિફ્ટ, ડ્રિફ્ટ અને સમયને ધ્યાનમાં લઈને જાણીતા પ્રારંભિક કોઓર્ડિનેટ્સમાંથી તેના વર્તમાન (રેકનેબલ) કોઓર્ડિનેટ્સની ગણતરી કરીને વહાણની સ્થિતિ નક્કી કરવી તેને જહાજના કોઓર્ડિનેટ્સની ડેડ રેકનીંગ કહેવામાં આવે છે ( મૃત ગણતરી ) અથવા સંક્ષિપ્તમાંમૃત ગણતરી .
વહાણના સ્થાનના કોઓર્ડિનેટ્સ કહેવામાં આવે છે ગણી શકાય તેવા કોઓર્ડિનેટ્સઅને નિયુક્ત કરવામાં આવે છે:
φ સાથે - અસંખ્ય અક્ષાંશ;
λ સાથે - ગણતરીપાત્ર રેખાંશ.
ગણનાપાત્ર સ્થળ - વહાણની સ્થિતિ, તેની સ્થિતિના કોઓર્ડિનેટ્સની મૃત ગણતરીના આધારે નક્કી કરવામાં આવે છે.
નોટેશનનો હેતુ એક ચોકસાઈ સાથે ભૂપ્રદેશને સંબંધિત વહાણનું દિશાનિર્દેશ છે જે તેના નેવિગેશનની નેવિગેશનલ સલામતીની ખાતરી આપે છે.
વાસ્તવમાં જહાજ પ્રોપલ્શન, પવન અને પ્રવાહના પ્રભાવ હેઠળ જે રેખા સાથે આગળ વધે છે તેને કહેવામાં આવે છે માર્ગની રેખા.
નોટેશનનો સાર તેમાં એ હકીકતનો સમાવેશ થાય છે કે નેવિગેશન નકશા પરના જાણીતા પ્રારંભિક સ્થાનેથી, જહાજની હિલચાલની દિશાઓ અને તેમની સાથે મુસાફરી કરવામાં આવેલ અંતર સમયના કોઈપણ સમયે તેનું સ્થાન મેળવવા માટે કાવતરું કરવામાં આવે છે.
ડેડ રેકૉનિંગ જહાજ કોઓર્ડિનેટ્સ વર્ગીકૃત:
નંબર પદ્ધતિ દ્વારા :
ગ્રાફિક , સંખ્યાના ઘટકોના સતત એકાઉન્ટિંગ અને નેવિગેશન નકશા પર તેમના નિરૂપણના આધારે;
વિશ્લેષણાત્મક , ચોક્કસ ગાણિતિક નિર્ભરતા અનુસાર વર્તમાન કોઓર્ડિનેટ્સની ગણતરીના આધારે.
ઓટોમેશનની ડિગ્રી દ્વારા :
આપોઆપ , વિશિષ્ટ કમ્પ્યુટર્સ (ઓટો-પ્લોટર, ઓટો-કેલ્ક્યુલેટર, વગેરે) નો ઉપયોગ કરીને ઉત્પાદિત;
નિરીક્ષણાત્મક , બાહ્ય સીમાચિહ્નો પર આધારિત વર્તમાન ગણી શકાય તેવા કોઓર્ડિનેટ્સના સતત શુદ્ધીકરણ પર આધારિત સ્વચાલિત ગણતરી;
મેન્યુઅલ , મેન્યુઅલી અથવા કોષ્ટકોનો ઉપયોગ કરીને કરવામાં આવતી ગ્રાફિક-વિશ્લેષણાત્મક ક્રિયાઓનો ઉપયોગ કરીને બનાવવામાં આવે છે.
વહાણની ડેડ રેકનીંગ માટેની આવશ્યકતાઓ
મૃત ગણતરી દ્વારાનીચે પ્રસ્તુત છે જરૂરિયાતો:
ગણતરી રાખવી જોઈએ સતતકોઈપણ સમયે ભૂપ્રદેશની તુલનામાં વહાણની સ્થિતિ (તેના વર્તમાન કોઓર્ડિનેટ્સ) જાણવા માટે;
ગણતરી હોવી જોઈએ ચોક્કસનેવિગેશનલ સલામતી અને આપેલ જહાજમાં સહજ સમસ્યાઓના ઉકેલની ખાતરી કરવા;
ગણતરી પૂરતી હોવી જોઈએ સરળ અને સ્પષ્ટ.
વહાણની હિલચાલ માટે એકાઉન્ટિંગની પસંદગીની પદ્ધતિ છે ફરજિયાત મેન્યુઅલ ગ્રાફિકલ ગણતરી સાથે આપોઆપ, જે આવશ્યકપણે ગણતરી માટેની તમામ જરૂરિયાતોને સંતોષે છે.
આધુનિક નેવિગેશન પ્રણાલીઓ સાથે પણ જેમાં ગણતરીની પ્રક્રિયા સંપૂર્ણપણે સ્વચાલિત છે અને ઉચ્ચ ચોકસાઈ ધરાવે છે, ઉપકરણોમાં ખામી સર્જાય તો તેને નિયંત્રિત કરવા અને ભૂલોને દૂર કરવા માટે મેન્યુઅલ ગ્રાફિક ગણતરી ફરજિયાત છે.
ગણતરીની મેન્યુઅલ ગ્રાફિકલ પદ્ધતિને ઘણીવાર નેવિગેશન પ્લોટિંગ કહેવામાં આવે છે, જોકે બાદમાં → એક વ્યાપક ખ્યાલ છે (+ સ્થાનોનું નિર્ધારણ, વગેરે).
વહાણના માર્ગનું નેવિગેશન કાવતરું - નેવિગેશનની નેવિગેશનલ સમસ્યાઓ હલ કરતી વખતે દરિયાઈ નકશા પર ગ્રાફિક બાંધકામો.
જહાજના માર્ગની મેન્યુઅલ ગ્રાફિકલ ડેડ રેકૉનિંગ દ્વારા સમસ્યાઓનું નિરાકરણ
પવન અને પ્રવાહની ગેરહાજરીમાં, વહાણ તેના પોતાના પ્રોપલ્શનના પ્રભાવ હેઠળ જ સમુદ્રતળની તુલનામાં આગળ વધે છે.
જો આપણે વહાણના હાડકાની અવગણના કરીએ (તેમને સોંપેલ અભ્યાસક્રમમાંથી સુકાનીના વિચલનો) અને હેડિંગ સૂચકના સુધારણાને સતત માનીએ, તો નેવિગેશન નકશા પર વહાણનો માર્ગ એક સીધી રેખા તરીકે દર્શાવવામાં આવશે. સાચા અભ્યાસક્રમની દિશા.
વહાણનો રસ્તો - વહાણના દળના કેન્દ્રની હિલચાલની દિશા, સાચા મેરિડીયનના ઉત્તરીય ભાગ અને વહાણની પાથ રેખા ઘડિયાળની દિશામાં 0° થી 360 ° (ગોળ ગણતરી સિસ્ટમ) વચ્ચેના આડી કોણ દ્વારા માપવામાં આવે છે.
વહાણનો ટ્રેક - તે રેખા કે જેની સાથે વહાણના સમૂહનું કેન્દ્ર સમુદ્રતળની તુલનામાં આગળ વધે છે(ફિગ. 5.3).
ચોખા. 5.3. માર્ગ અને વહાણનો માર્ગ
જ્યારે ડ્રિફ્ટ અને કરંટને ધ્યાનમાં લીધા વિના જહાજના કોઓર્ડિનેટ્સની જાતે ગ્રાફિકલી ગણતરી કરવામાં આવે છે, ત્યારે નીચેની સમસ્યાઓ હલ થાય છે:
સાચા અભ્યાસક્રમોની ગણતરી અને કાવતરું;
વહાણ દ્વારા મુસાફરી કરેલ અંતરની ગણતરી અને કાવતરું;
પરિભ્રમણ એકાઉન્ટિંગ - વહાણના અભ્યાસક્રમમાં ફેરફાર.
ગણતરીઓ કરતી વખતે, સાધન વાંચનનો ઉપયોગ થાય છે:
પુનરાવર્તક મથાળું સૂચક(ચુંબકીય હોકાયંત્ર, ગાયરોકોમ્પાસ, વગેરે) - QC;
પુનરાવર્તક પાછળ(મૂલ્યો વી એલઅને ઓ.એલ);
ટેકોમીટર(એનઆરપીએમ - પ્રોપેલર્સની ક્રાંતિની સંખ્યા);
વહાણની ઘડિયાળ (વર્તમાન સમય).
મૃત ગણતરીની શરૂઆતનું પ્રારંભિક બિંદુ એ એન્કર (બેરલ, બર્થ પર) પર જહાજનું સ્થાન છે, જે દરિયાકાંઠાના સીમાચિહ્નોના અવલોકનો દ્વારા અથવા મૃત ગણતરી (ફિગ. 5.4) દ્વારા નક્કી કરવામાં આવે છે.

ચોખા. 5.4. સજાવટ ગ્રાફિકલ નોટેશનમાર્ગ નકશા પર વહાણનો માર્ગ
1. ગણી શકાય તેવા કોઓર્ડિનેટ્સ દ્વારા ( φ સાથે , λ સાથે) અમે એન્કરેજ સ્થાનને ચિહ્નિત કરીએ છીએ, જેની નજીક, ખાલી જગ્યામાં, અમે એન્કરથી શૂટિંગનો સમય અને લોગ કાઉન્ટરનું સંપૂર્ણ વાંચન રેકોર્ડ કરીએ છીએ ( ઓ.એલ 0 ):
બધા કિસ્સાઓમાં, પ્રવેશની અપૂર્ણાંક રેખા દોરવામાં આવે છે શાસક સાથે અને સમાંતર સમાંતર.
2. એન્કોરેજ પોઈન્ટ પરથી આપણે સાચા કોર્સ લાઇનની દિશા દોરીએ છીએ, જે સૂત્ર દ્વારા ગણવામાં આવે છે:
જો મથાળું માર્ગદર્શન ગાયરોકોમ્પાસમાંથી આવે છે, તો પછી
જો મથાળું માર્ગદર્શન ચુંબકીય હોકાયંત્રમાંથી આવે છે, તો પછી
|
IR = QC એમ.કે + Δ એમ.કે |
|
Δ MK = d + δ |
- ચુંબકીય હોકાયંત્ર કરેક્શન.
એન્કરેજ પોઈન્ટ પરથી દોરવામાં આવેલ ઉપર ટ્રુ કોર્સ લાઇન (ટ્રેક લાઇન)શિલાલેખ બનાવવામાં આવે છે:
QC- હોકાયંત્ર મથાળા માટે સંક્ષિપ્ત હોદ્દો ( જીકેકે, કેકે જીએલ , કે.કે પી);
127.0° - હેલ્મસમેનને આપવામાં આવેલ હોકાયંત્ર હેડિંગ મૂલ્ય (વચ્ચે સમાન ચિહ્ન QCઅને 127.0° નિયમો અનુસાર સેટ કરેલ નથી);
(+2.0°) – સ્વીકૃત મથાળાના સુધારાની તીવ્રતા અને ચિહ્ન કૌંસમાં દર્શાવેલ છે.
કોર્સ લાઇન ઉપરનો શિલાલેખ તમને નિયંત્રિત કરવાની મંજૂરી આપે છે :
હેલ્મ્સમેન દ્વારા આપેલ અભ્યાસક્રમ (127.0°) જાળવવાની સાચીતા;
સ્વીકૃત અને ધ્યાનમાં લેવામાં આવેલ હેડિંગ સૂચક કરેક્શનની તીવ્રતા (+2.0°);
નકશા પર સાચી હેડિંગ લાઇનની સાચી દિશા (129.0°).
જ્યારે જહાજ આપેલ કોર્સને અનુસરતું હોય, ત્યારે હેલ્મમેન નિયમિતપણે (દર 15 મિનિટે) મુખ્ય અભ્યાસક્રમ સૂચક (દ્વારા જી.કેઅથવા દ્વારા જીએઅથવા અન્ય) અને ઘડિયાળના કેપ્ટન (ઘડિયાળના અધિકારી)ને રિપોર્ટ સાથે ચુંબકીય હોકાયંત્ર દ્વારા.
વહાણના ગણતરી કરેલ કોઓર્ડિનેટ્સ જહાજની લોગબુકમાં રેકોર્ડ કરવામાં આવે છે. :
જ્યારે એન્કર (બેરલ) માંથી વાસણને દૂર કરો અને જ્યારે એન્કરિંગ (બેરલ);
ડેડ રેકનીંગ દ્વારા સફર કરતી વખતે, 4 દ્વારા વિભાજ્ય કલાકોમાં (00, 04, 08 ... 20);
દર કલાકે જ્યારે વહાણ કિનારાની નજીક ડેડ રેકનિંગ દ્વારા સફર કરે છે;
નેવિગેટરની (ચાલી રહેલી) ઘડિયાળ બદલતી વખતે અને અન્ય કિસ્સાઓમાં કેપ્ટન દ્વારા નિર્દેશિત.
નેવિગેશન ચાર્ટ પર જહાજની અસંખ્ય સ્થિતિ દર્શાવેલ છે. :
ચાર વડે વિભાજ્ય કલાકો પર (00, 04 ... 20);
જ્યારે વહાણ તેનો માર્ગ અથવા ગતિ બદલે છે;
નેવિગેટરની (ચાલી રહેલી) ઘડિયાળ બદલતી વખતે;
દર કલાકે જ્યારે વહાણ કિનારાની નજીક અથવા તોફાની પાણીમાં સફર કરતું હોય, અને કેપ્ટન દ્વારા નિર્દેશિત અન્ય કિસ્સાઓમાં.
આપેલ (વર્તમાન) સમય માટે ગણતરીપાત્ર સ્થાન શોધવા માટે, અનુસરો (ફિગ. 5.4):
± 1 મિનિટની ચોકસાઈ સાથે વહાણના ઘડિયાળના વાંચનને રેકોર્ડ કરો (11.00) ;
લેગ કાઉન્ટને ઠીક કરો ( ઓ.એલ 1 ) 0.1 માઇલ સુધી સચોટ (60,4) ;
(માટે વી એલ= 18 ગાંઠ → પ્રતિ એલ = 1,02)એસ એલ= 1.02 11.8 = 12,0 માઇલ
એસ વિશે =12,0 માઇલ
આપેલ છે તે એસ એલ = એસ વિશે → તેનું મૂલ્ય (નકશા સ્કેલ પર) સાચા અભ્યાસક્રમની રેખા સાથે પ્રારંભિક બિંદુથી લખો અને વહાણની ગણનાપાત્ર સ્થિતિ (11.00 પર) એક પ્રતીક સાથે ચિહ્નિત કરો ( સ્ટ્રોક લાઇન IR ~ 5 mm).
નંબર સ્થાનની બાજુમાં અપૂર્ણાંક લખો ![]()
ગણતરી કરતી વખતે, તે ઘણીવાર જરૂરી છે આપેલ બિંદુ પર જહાજના આગમનનો સમય અને લોગ ગણતરી જાણો(મીટિંગ પોઈન્ટ, એન્કરેજ પોઈન્ટ, વગેરે).
આવા બિંદુને સ્પષ્ટ કરી શકાય છે (ફિગ. 5.5):

ચોખા. 5.5. નકશા પર બિંદુ સ્પષ્ટ કરવા માટેની પદ્ધતિઓ
સંકલન ( φ, λ );
સીમાચિહ્ન તરફ દિશા ( આઈપીઅથવા કુ);
અંતર ( ડી) એક સીમાચિહ્ન માટે, વગેરે.
સમસ્યા હલ કરવા માટેની પ્રક્રિયા .
), જે તમને યાટીંગમાં લાગુ નેવિગેશન સમસ્યાઓના નિરાકરણ માટે સીધા જ જવા દે છે. લેખોની આ શ્રેણીમાં આપણે શીખીશું કે જહાજના માર્ગની ગણતરી કેવી રીતે કરવી, તેને દરિયાઈ નેવિગેશન ચાર્ટ પર કેવી રીતે દોરવી, અને ફરીથી, આપણે નવા ખ્યાલોથી પરિચિત થઈશું. ઠીક છે, અમે આ વિના કેવી રીતે કરી શકીએ (હું ખ્યાલો વિશે વાત કરું છું). સલામત યાટિંગની ખાતરી કરવા માટે, સુકાનીએ સ્પષ્ટપણે પર્યાવરણ નેવિગેટ કરો અને તમારી બોટની જગ્યા સ્પષ્ટપણે જાણો. આ સમસ્યાને ઉકેલવા માટે, નકશા પર ગ્રાફિકલ બાંધકામો કરવામાં આવે છે, જે પાથની દિશા, હોકાયંત્રના અભ્યાસક્રમોના મૂલ્યો, બેરિંગ્સના મૂલ્યો અને લીધેલા અંતર, શોધાયેલ વસ્તુઓમાંથી સુરક્ષિત વિચલન માટેની ગણતરીઓ વગેરેને પ્રતિબિંબિત કરે છે. આવા બાંધકામોના સમગ્ર સંકુલને નેવિગેશન પ્લોટ કહેવામાં આવે છે.
સંક્રમણ શરૂ થાય તે પહેલાં, યાટ્સમેન આગામી યાટીંગ માટે નેવિગેશન શરતોની સમગ્ર શ્રેણીનો અભ્યાસ કરે છે અને અપેક્ષિત સંક્રમણ માર્ગ અને નકશા પર વધારાની માહિતી (નકશો ઉભો કરે છે) દર્શાવે છે. આ એક પૂર્વ લેઆઉટ છે.
યાટ છોડતાની સાથે જ, નેવિગેટર ચળવળ, અભ્યાસક્રમો, ઝડપ અને હેતુવાળા પાથથી ડ્રિફ્ટના તત્વોને કાળજીપૂર્વક રેકોર્ડ કરવાનું શરૂ કરે છે. યાટ પરના નેવિગેશનલ સ્ટાફનો અર્થ સામાન્ય રીતે કેપ્ટન હોય છે. બીજું કોણ, તે કાપણી કરનાર અને પાઇપ પર બંને છે... સારું, તમે સમજો છો. જો કે કેટલીકવાર બોટ પર સક્ષમ ક્રૂ સભ્યો (અંગો નહીં) હોય છે જેઓ આ કાર્ય કરી શકે છે. જો કે, હું વિષયાંતર કરું છું, ચાલો આપણા... એકાઉન્ટિંગ પર પાછા ફરીએ. જહાજનું સ્થાન અને બાહ્ય પરિબળો (પવન પ્રવાહ અને પ્રવાહ) ના પ્રભાવના તત્વો નકશા પર નિર્ધારિત અને કાવતરું કરવામાં આવે છે. આ એક પ્રદર્શન ગાસ્કેટ છે.
જ્યારે યાટની ચોક્કસ સ્થિતિ નેવિગેશનલ અથવા અન્ય માધ્યમો દ્વારા નિર્ધારિત કરવામાં આવતી નથી, ત્યારે તે જે અભ્યાસક્રમ અનુસરે છે તેનો ઉપયોગ કરીને, બાહ્ય પ્રભાવના પરિમાણો (જો નિર્ધારિત હોય તો) અને ઝડપનો ઉપયોગ કરીને તેને ચાર્ટ પર દર્શાવવામાં આવે છે. આ મૃત ગણતરી પદ્ધતિ છે. જહાજના માર્ગની ગણતરી સમગ્ર પેસેજ દરમિયાન સતત હાથ ધરવામાં આવે છે અને જ્યારે યાટમેનને નિરીક્ષણ સ્થળ મળે ત્યારે જરૂરી હોય તો તેનો ડેટા સુધારવામાં આવે છે. ડેડ રેકૉનિંગ સિસ્ટમ પોતે બે પ્રકારમાં આવે છે: ગ્રાફિક અને વિશ્લેષણાત્મક.
વહાણના માર્ગની વિશ્લેષણાત્મક મૃત ગણતરી.
વહાણના પાથની વિશ્લેષણાત્મક મૃત ગણતરીમાં સૂત્રો અને જાણીતા ડેટાનો ઉપયોગ કરીને યાટના સ્થાનના કોઓર્ડિનેટ્સની ગણતરી કરવી અને પછી તેને નકશા પર કાવતરું કરવું શામેલ છે. નાના પાયે નકશાનો ઉપયોગ કરતી વખતે આ ડેડ રેકૉનિંગ પદ્ધતિનો ઉપયોગ મુખ્યત્વે સમુદ્રી નેવિગેશનમાં થાય છે. આધુનિક યાચિંગમાં, આ જહાજની ડેડ રેકૉનિંગ સિસ્ટમની ખૂબ માંગ નથી; આજકાલ ફક્ત વ્યાવસાયિક નેવિગેટર્સ તેમાં સામેલ છે; જીપીએસ તેમને મદદ કરે છે. તેથી, અમે આ લેખમાં તેને ધ્યાનમાં લઈશું નહીં. પરંતુ ચાલો વહાણના પાથની ગ્રાફિકલ ડેડ રેકનીંગને વધુ વિગતમાં જોઈએ, ખાસ કરીને કારણ કે તે સાહજિક છે અને શિખાઉ યાટ્સમેનને પણ ઇલેક્ટ્રોનિક્સ (પાહ-પાહ-પાહ) વગર જગ્યામાં નેવિગેટ કરવાની મંજૂરી આપે છે.
વહાણના માર્ગની ગ્રાફિક ડેડ રેકનીંગ.
વહાણના ગ્રાફિકલ ડેડ રેકૉનિંગની પદ્ધતિમાં નકશા પર ડ્રિફ્ટ (જો તેના પરિમાણો જાણીતા હોય તો) ધ્યાનમાં લેતા અભ્યાસક્રમો અને અન્ય ડેટા દર્શાવતા નકશા પર ટ્રેક લાઇન બનાવવાનો સમાવેશ થાય છે. આ બે મૃત ગણતરી પ્રણાલીઓ વચ્ચેના તફાવતનો સાર એ છે કે જહાજના વિશ્લેષણાત્મક મૃત ગણતરીમાં, ઉપરોક્ત ગ્રાફિકલ બાંધકામોનું સંકુલ હાથ ધરવામાં આવતું નથી, અને તેથી કલાપ્રેમી યાટ્સમેનની વિશાળ શ્રેણી માટે માસ્ટર કરવું મુશ્કેલ છે. અને કોણ તંગ નેવિગેટરની સીટ પર બેસીને અંકગણિત કામગીરી કરવા માંગે છે? અથવા શું તમે તે જ વસ્તુ કરો છો, સમાન પ્રવૃત્તિ કરો છો, પરંતુ નકશા પર રસપ્રદ રેખાઓ અને તીરો દોરો છો? મુખ્ય વસ્તુ એ છે કે ડ્રોઇંગ સાથે ખૂબ દૂર ન જવું અને નકશાને બગાડવો નહીં, જે તમે યાટિંગ વિના કરી શકતા નથી.
કોઈપણ મૃત ગણતરી પદ્ધતિના પરિણામે જહાજની સ્થિતિ પ્રાપ્ત થાય છે તેને ડેડ રેકનીંગ કહેવામાં આવે છે. ચાલો હમણાં માટે વહાણના માર્ગની મૃત ગણતરીના ખ્યાલ પર ધ્યાન આપીએ. શરૂ કરવા માટે, ચાલો ધારીએ કે યાટ કોઈપણ બાહ્ય પરિબળોથી પ્રભાવિત નથી (ન તો ડ્રિફ્ટ કે વર્તમાન). પછી તે સ્પષ્ટ છે કે વહાણનો માર્ગ તેના માર્ગની રેખા સાથે રહેલો હશે અને તે આ સમયગાળાના મૂલ્ય દ્વારા તેની ગતિના ઉત્પાદનની બરાબર ચોક્કસ સમયગાળામાં અંતર કાપશે.
નકશા પર દર્શાવેલ યાટના પાથને હેડિંગ એંગલ કહેવામાં આવે છે. યાટના રૂટ પર બોટ દ્વારા મુસાફરી કરવામાં આવેલ અંતર દર્શાવવામાં આવ્યું છે. આ અંતર સૈદ્ધાંતિક રીતે સમય દ્વારા ઝડપના ગુણાકાર દ્વારા નક્કી કરી શકાય છે, પરંતુ વ્યવહારીક રીતે તે લોગ રીડિંગ્સમાંથી લેવામાં આવે છે, કારણ કે લોગ બરાબર મુસાફરી કરેલ અંતરની ગણતરી કરે છે અને તે પહેલાથી જ ઝડપની "ગણતરી" કરે છે. વહાણના પાથના ગ્રાફિકલ ડેડ રેકનીંગના પ્રારંભિક બિંદુએ, સમય અને લેગ ગણતરી (T1 અને OL1) અપૂર્ણાંકના સ્વરૂપમાં નોંધવામાં આવે છે, જેનો અંશ સમય (મિનિટથી ચોક્કસ) અને છેદ છે. એ લેગ કાઉન્ટ છે (0.1 નોટિકલ માઇલ સુધી સચોટ). આ ડેટા દરેક ગણી શકાય તેવા સ્થળની નજીકના નકશા પર રચાયેલ છે (જો ત્યાં અવલોકન હોય તો, અવલોકન કરેલ સ્થળ પર). વહાણનો અભ્યાસક્રમ સંદર્ભ બિંદુ પરથી રચાયેલ છે. આ બિંદુને સંબંધિત, બાકીની ગણતરીઓ અને બાંધકામો કરવામાં આવે છે. યાટિંગની શરતો અને જટિલતાને આધારે, ગણતરીપાત્ર અને અવલોકન કરાયેલા મુદ્દાઓ બનાવવાની આવર્તન કેપ્ટનના નિર્ણય દ્વારા નક્કી કરવામાં આવે છે.
જહાજની મૃત ગણતરી, ગ્રાફિક સમસ્યાઓ હલ કરવી.
હવે જ્યારે આપણે ડેડ રેકનિંગ અને રૂટીંગથી થોડા પરિચિત થઈ ગયા છીએ, ત્યારે અમે ગ્રાફિક સમસ્યાઓને સીધી રીતે ઉકેલવા તરફ આગળ વધી શકીએ છીએ. તો ચાલો શરુ કરીએ. ઉપલબ્ધ કોઓર્ડિનેટ્સનો ઉપયોગ કરીને, અમે નકશા પર એક અસંખ્ય સ્થાન મૂકીએ છીએ જ્યાંથી અમે આગળનું બાંધકામ કરીશું (આ એક અવલોકન સ્થળ હોઈ શકે છે, ત્યાં કોઈ મૂળભૂત તફાવત નથી, ફક્ત હોદ્દો અલગ છે).
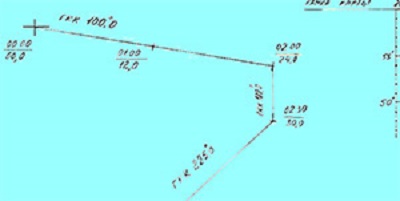
આ કિસ્સામાં, આપણો પ્રારંભિક ડેટા આવો: પ્રારંભિક સમય 00.00; પ્રારંભિક લેગ ગણતરી 00.0; વહાણની ઝડપ 12 નોટ છે. તે સ્પષ્ટ છે કે વ્યવહારિક સઢવાળી યાટમાં કોઈ પણ આટલી ઝડપે જતું નથી, પરંતુ ચાલો "અમારા નાના ભાઈઓ" - મોટર યાટ્સ વિશે ભૂલશો નહીં. અને સમાન ગણતરીઓ તેમના માટે પણ સંબંધિત છે. હકીકત એ છે કે તેમની પાસે સાચી યાટિંગના મહત્વપૂર્ણ ઘટકનો અભાવ હોવા છતાં - એક સઢ, દરિયામાં તેઓ સઢવાળી યાટ્સ જેવા જ પરિબળોને આધિન છે.
 અમે સમાંતર શાસક અને નેવિગેટરના પ્રોટ્રેક્ટરનો ઉપયોગ કરીને આ બિંદુથી કોર્સ લાઇન દોરીએ છીએ. પ્રારંભિક શીર્ષકને 100° રહેવા દો; વર્તમાન અને ડ્રિફ્ટ હજુ સુધી અમને ખબર નથી, અને તેથી ધ્યાનમાં લેવામાં આવતા નથી. અને જહાજના હોકાયંત્રમાંથી લીધેલા હોકાયંત્રના મથાળાના મૂલ્યને સાચામાં કન્વર્ટ કરવાનું ભૂલશો નહીં. યાટીંગનો એક કલાક પસાર થાય છે. સમય 01.00 હશે. લેગ કાઉન્ટ 12.0 છે. ચાલો 01.00 વાગ્યે નકશા પર આ ગણતરીપાત્ર બિંદુને ચિહ્નિત કરીએ. આગળ, બીજા એક કલાકમાં, અમારે નવા અભ્યાસક્રમ તરફ વળવું પડશે - 180°. પરંતુ હમણાં માટે આપણે માત્ર 01.00 પર બિંદુને ચિહ્નિત કરીશું.
અમે સમાંતર શાસક અને નેવિગેટરના પ્રોટ્રેક્ટરનો ઉપયોગ કરીને આ બિંદુથી કોર્સ લાઇન દોરીએ છીએ. પ્રારંભિક શીર્ષકને 100° રહેવા દો; વર્તમાન અને ડ્રિફ્ટ હજુ સુધી અમને ખબર નથી, અને તેથી ધ્યાનમાં લેવામાં આવતા નથી. અને જહાજના હોકાયંત્રમાંથી લીધેલા હોકાયંત્રના મથાળાના મૂલ્યને સાચામાં કન્વર્ટ કરવાનું ભૂલશો નહીં. યાટીંગનો એક કલાક પસાર થાય છે. સમય 01.00 હશે. લેગ કાઉન્ટ 12.0 છે. ચાલો 01.00 વાગ્યે નકશા પર આ ગણતરીપાત્ર બિંદુને ચિહ્નિત કરીએ. આગળ, બીજા એક કલાકમાં, અમારે નવા અભ્યાસક્રમ તરફ વળવું પડશે - 180°. પરંતુ હમણાં માટે આપણે માત્ર 01.00 પર બિંદુને ચિહ્નિત કરીશું.
સમય 02.00 વાગ્યે આવ્યો છે. અને અમે, જરૂર મુજબ, 180°ના કોર્સ તરફ વળ્યા. સમયની અમારી ક્ષણને અનુરૂપ બિંદુથી, અમે ફક્ત એક નવો અભ્યાસક્રમ બનાવીશું. તે જ સમયે, અમે હજી પણ વહાણના માર્ગની ગ્રાફિકલ ડેડ રેકનીંગ કરી રહ્યા છીએ. અમારી પાસે કોઈ અવલોકનો નથી. બીજા અડધા કલાકમાં આપણે 225°ના નવા કોર્સ તરફ વળીશું. અને હવે અમારી લેગ કાઉન્ટ 24.0 છે. ચાલો ગણતરી કરીએ કે ગણતરીપાત્ર બિંદુ મેળવવા માટે આપણે કોર્સ લાઇન પર કેટલું અંતર રાખવાની જરૂર છે.
ROL (લેગ કાઉન્ટ તફાવત) = 24 - 12 = 12 - 12 નોટિકલ માઇલ અલગ રાખો.
 નવી રેટ લાઇન ઉપર દરનું મૂલ્ય લખવાનું ભૂલશો નહીં. અડધા કલાકમાં સમય 02.30 થશે, અને લેગ કાઉન્ટ 30.0 હશે. અમે ઉપર જણાવ્યા મુજબ વિલંબિત અંતરની ફરીથી ગણતરી કરીએ છીએ:
નવી રેટ લાઇન ઉપર દરનું મૂલ્ય લખવાનું ભૂલશો નહીં. અડધા કલાકમાં સમય 02.30 થશે, અને લેગ કાઉન્ટ 30.0 હશે. અમે ઉપર જણાવ્યા મુજબ વિલંબિત અંતરની ફરીથી ગણતરી કરીએ છીએ:
ROL = 30 - 24 = 6 - 6 નોટિકલ માઇલ અલગ રાખો, અમારા રેકનીંગ પોઈન્ટને ચિહ્નિત કરો અને નવો અભ્યાસક્રમ બનાવો.
હવે, ધારો કે અમારી પાસે અમારી યાટનું સ્થાન ચોક્કસ રીતે નક્કી કરવાની તક છે, તો અમે 15 મિનિટમાં અવલોકન કરીશું. તદનુસાર, સમય બિંદુ 02.45 હશે, અને લેગ કાઉન્ટ 33.0 હશે.
અરે! પરંતુ આપણો અવલોકન કરેલ બિંદુ ગણનાપાત્ર બિંદુ સાથે મેળ ખાતો નથી. અમારી મૃત ગણતરી પદ્ધતિમાં આનો અર્થ શું છે? પરંતુ તમે તરત જ ખાતરી માટે કહી શકતા નથી. યાટિંગમાં બધું એટલું સરળ નથી.
અમે ફક્ત એવું માની શકીએ છીએ કે અમે ભૂલથી યાટનું સ્થાન નક્કી કર્યું છે અથવા તે વર્તમાન અથવા પવનના પ્રવાહથી પ્રભાવિત છે.
અમે માત્ર કેટલાક અવલોકનો કરીને જ વિસંગતતાના કારણને વધુ સચોટ રીતે નક્કી કરી શકીએ છીએ. ચાલો ગણતરીપાત્ર બિંદુઓને સંબંધિત તેમની સ્થિતિનું વિશ્લેષણ કરીએ અને જોઈએ કે શું થઈ રહ્યું છે. આ કરવા માટે, અમે દર 15 મિનિટે સ્થાન નિર્ધારણ કરવાનું ચાલુ રાખીશું. અમારા લેઆઉટના ડ્રોઇંગમાં, ગણનાપાત્ર બિંદુઓ અને તેમની બાજુમાં અવલોકન કરેલ મુદ્દાઓ દૃશ્યમાન થશે.
મહેરબાની કરીને નોંધ કરો કે ગણતરીપાત્ર અને અવલોકન કરેલ બિંદુઓ વચ્ચે કોઈ વેવી લાઇન (વિસંગતતા) નથી. આનો અર્થ એ છે કે અમે અવલોકનને ધ્યાનમાં લીધું નથી અને પ્લોટ કરેલ કોર્સ લાઇન પર અમારું સ્થાન ધારીને વહાણના માર્ગની ગ્રાફિકલ ડેડ રેકૉનિંગ કરવાનું ચાલુ રાખ્યું છે. આનો અર્થ એ નથી કે નિરીક્ષણને જ પ્રશ્નમાં બોલાવવામાં આવે છે. અમે હમણાં માટે જ વિચારી રહ્યા છીએ, અને યાટિંગના સંજોગો અમને હાલ માટે અવલોકન બિંદુને ધ્યાનમાં ન લેવાની મંજૂરી આપે છે. સઢવાળી વખતે, ઉદાહરણ તરીકે, ખેંચાણવાળી સ્થિતિમાં, અમે સતત વહાણનું સ્થાન નક્કી કરીએ છીએ અને અવલોકનો દ્વારા નેવિગેટ કરીએ છીએ. પરંતુ તેના પર પછીથી વધુ.
 ચાલો આપણા નકશા પર પાછા ફરીએ. આપણે જોઈએ છીએ કે અવલોકન કરેલ બિંદુઓ ગણી શકાય તેવા મુદ્દાઓથી આગળ અને આગળ આવેલા છે. આ પહેલેથી જ એક સિસ્ટમ છે. અમે કારણો શોધીએ છીએ અને વિશ્લેષણ શરૂ કરીએ છીએ. આપણે સૌપ્રથમ ધ્યાન આપવાની જરૂર છે કે કઈ રેખા, સીધી કે વળાંક પર આપણા બિંદુઓ સ્થિત છે. જો કોઈ વળાંક સાથે હોય (અમુક પ્રકારનું હાયપરબોલ, ઉદાહરણ તરીકે - પરંતુ, સૌથી અગત્યનું, સાચા વળાંક સાથે), તો અમને માનવાનો પૂરો અધિકાર છે કે અમારી મૃત ગણતરી પદ્ધતિમાં યાટની સ્થિતિ નક્કી કરવા માટે વપરાયેલ સીમાચિહ્ન ખોટી રીતે કરવામાં આવ્યું છે. એક સીમાચિહ્નના નેવિગેશન પેરામીટર્સ (ઉદાહરણ તરીકે, બેરિંગ્સ અને અંતર) ના મૂલ્યો લઈને, અમે અને અમે નકશા પર તેમને બીજાથી ઓળખીએ છીએ. આ કિસ્સામાં, ઉપલબ્ધ તમામ માધ્યમોનો ઉપયોગ કરીને સીમાચિહ્ન(ઓ)ને તરત જ ઓળખવા જરૂરી છે. (જીપીએસ નિયંત્રણ વિશે ભૂલશો નહીં). જો અમારા બિંદુઓ સીધી રેખામાં સ્થિત છે, તો તેનો અર્થ એ છે કે કેટલાક બાહ્ય (અને, વધુમાં, રેખીય) પરિબળ યાટ પર કાર્ય કરી રહ્યું છે.
ચાલો આપણા નકશા પર પાછા ફરીએ. આપણે જોઈએ છીએ કે અવલોકન કરેલ બિંદુઓ ગણી શકાય તેવા મુદ્દાઓથી આગળ અને આગળ આવેલા છે. આ પહેલેથી જ એક સિસ્ટમ છે. અમે કારણો શોધીએ છીએ અને વિશ્લેષણ શરૂ કરીએ છીએ. આપણે સૌપ્રથમ ધ્યાન આપવાની જરૂર છે કે કઈ રેખા, સીધી કે વળાંક પર આપણા બિંદુઓ સ્થિત છે. જો કોઈ વળાંક સાથે હોય (અમુક પ્રકારનું હાયપરબોલ, ઉદાહરણ તરીકે - પરંતુ, સૌથી અગત્યનું, સાચા વળાંક સાથે), તો અમને માનવાનો પૂરો અધિકાર છે કે અમારી મૃત ગણતરી પદ્ધતિમાં યાટની સ્થિતિ નક્કી કરવા માટે વપરાયેલ સીમાચિહ્ન ખોટી રીતે કરવામાં આવ્યું છે. એક સીમાચિહ્નના નેવિગેશન પેરામીટર્સ (ઉદાહરણ તરીકે, બેરિંગ્સ અને અંતર) ના મૂલ્યો લઈને, અમે અને અમે નકશા પર તેમને બીજાથી ઓળખીએ છીએ. આ કિસ્સામાં, ઉપલબ્ધ તમામ માધ્યમોનો ઉપયોગ કરીને સીમાચિહ્ન(ઓ)ને તરત જ ઓળખવા જરૂરી છે. (જીપીએસ નિયંત્રણ વિશે ભૂલશો નહીં). જો અમારા બિંદુઓ સીધી રેખામાં સ્થિત છે, તો તેનો અર્થ એ છે કે કેટલાક બાહ્ય (અને, વધુમાં, રેખીય) પરિબળ યાટ પર કાર્ય કરી રહ્યું છે.
સરળ શબ્દોમાં કહીએ તો, કાં તો પવન આપણને દૂર લઈ જાય છે, અથવા પ્રવાહ, અથવા બંને. આપણે આ કેવી રીતે નક્કી કરી શકીએ? સૈદ્ધાંતિક રીતે, તે મુશ્કેલ નથી. યાટિંગમાં તમે હંમેશા રસ્તો શોધી શકો છો. અહીં યાદ રાખવાના બે મહત્વપૂર્ણ નિયમો છે:
લેગ ડ્રિફ્ટને ધ્યાનમાં લે છે (નાના ડ્રિફ્ટ એંગલ પર).
લોગ વર્તમાનને ધ્યાનમાં લેતું નથી.
જો તમે ખૂબ હોંશિયાર ન થાઓ, તો તે આના જેવું લાગે છે. અમે નકશા પર બે ગણી શકાય તેવા બિંદુઓ અને અવલોકન બિંદુઓ વચ્ચેના અંતરને સમયસર તેમને અનુરૂપ માપન કરીએ છીએ. જો આ અંતર સમાન હોય, તો આપણે ડ્રિફ્ટ સાથે કામ કરી રહ્યા છીએ. લેગની પરવા નથી, તે ડ્રિફ્ટને ધ્યાનમાં લે છે. કે ત્યાં કોઈ ડ્રિફ્ટ નથી, કે ત્યાં છે, લેગ અંતર સૂચવે છે (જો તે સારી ક્રમમાં છે, અલબત્ત) પ્રમાણમાં યોગ્ય રીતે.
આપણા કિસ્સામાં પણ આ બરાબર છે, એટલે કે આપણે વહી રહ્યા છીએ. પરંતુ જો ગણતરીપાત્ર બિંદુઓની જોડી અને અનુરૂપ અવલોકન કરેલ બિંદુઓ વચ્ચેનું અંતર અલગ હોય, અને આ તફાવતની તીવ્રતા સતત હોય, તો આપણે નિઃશંકપણે વર્તમાનની ક્રિયાનો સામનો કરીએ છીએ.
પરંતુ આ લેખ અને વિચારશીલ વાચકના મગજને ઓવરલોડ ન કરવા માટે, અમે પછીથી, વહાણના મૃત ગણતરી પર ડ્રિફ્ટ અને કરંટના પ્રભાવ વિશે વાત કરીશું.
એ.ઇ. સેલેઝનેવ દ્વારા પુસ્તક "બેઝિક્સ ઓફ નેવિગેશન" ની સામગ્રીના આધારે







