Robotlarning eng oddiylari 2 g'ildirakli yoki 4 g'ildirakli. Bunday robot radio boshqariladigan avtomobilning shassisiga asoslangan bo'lishi mumkin, lekin hamma ham uni qo'lida bo'lmasligi mumkin yoki uni behuda sarflash uyat bo'lishi mumkin. Shassini o'zingiz ham qilishingiz mumkin, lekin g'ildiraklarni to'g'ridan-to'g'ri dvigatelga joylashtirish juda yaxshi yechim emas, vosita sekinlashishi kerak, bu esa vites qutisini talab qiladi. Tayyor shassi yoki vites qutisi yoki vites qutisi bo'lgan motorni olish, servolardan farqli o'laroq, unchalik oson ish emas edi. Deyarli har qanday servo haydovchi osongina vites qutisi bilan motorga aylantirilishi mumkin.
G'ildiraklarni to'g'ridan-to'g'ri bunday dvigatelning rokchisiga yopishtirish mumkin va servo korpus o'rnatish uchun qulaydir.
DIQQAT! Boshqa servolarning dizayni har xil bo'lishi mumkin va shuning uchun ushbu qo'llanma faqat qisman.
Eng oddiy va eng arzon servo asos qilib olingan:

Birinchidan, uni ajratib olaylik.

Birinchidan, keraksiz elektronikani olib tashlaymiz, haydovchini tishlaymiz va motorni to'g'ridan-to'g'ri boshqaramiz. Keyinchalik, mexanikani o'zgartirishni davom ettiramiz, birinchi vitesni tashqi mil bilan olib tashlang va undan sayohat to'xtash joyini olib tashlang.



Biz rezistorni chiqaramiz va uning tanasida joylashgan cheklovchini tishlaymiz.

Biz barcha mexanikani bir joyga qo'yamiz va hamma narsa yaxshi harakat qilishini tekshiramiz.
Keyingi qadam simni dvigatelga lehimlashdir.

Biz sobiq servoni vites qutisi bilan yangi dvigatelga yig'amiz.
Hamma narsa tayyor, agar siz hech qanday xato qilmagan bo'lsangiz, ishingizdan zavqlanishingiz mumkin.
Ushbu maqolada biz Arduino loyihalaridagi servolar haqida gapiramiz. Servo motorlar tufayli oddiy elektron loyihalar robotlashtirilgan. Servoni Arduino loyihasiga ulash sizga sensor signallariga qandaydir aniq harakatlar bilan javob berishga imkon beradi, masalan, eshikni ochish yoki sensorlarni kerakli yo'nalishda aylantirish. Maqolada servolarni boshqarish masalalari, servolarni Arduino-ga ulashning mumkin bo'lgan sxemalari, shuningdek eskiz misollari ko'rib chiqiladi.
Servo haydovchi harakat parametrlarini aniq nazorat qila oladigan haydovchi turidir. Boshqacha qilib aytganda, bu o'z milini ma'lum bir burchak ostida aylantira oladigan yoki aniq bir davrda uzluksiz aylanishni saqlay oladigan vosita.
Servo haydovchining ishlash sxemasi qayta aloqadan foydalanishga asoslangan (kirish va chiqish signallari mos kelmaydigan yopiq sxema). Servo haydovchi har qanday turdagi mexanik haydovchi bo'lishi mumkin, bu sensor va sensorda o'rnatilgan barcha parametrlarni avtomatik ravishda saqlaydigan boshqaruv blokini o'z ichiga oladi. Servo haydovchi vosita, joylashish sensori va boshqaruv tizimidan iborat. Bunday qurilmalarning asosiy vazifasi servomexanizmlar sohasida amalga oshirishdir. Shuningdek, servo drayvlar ko'pincha materiallarni qayta ishlash, transport uskunalarini ishlab chiqarish, yog'ochni qayta ishlash, metall plitalar ishlab chiqarish, qurilish materiallari ishlab chiqarish va boshqalarda qo'llaniladi.
Arduino robototexnika loyihalarida servo ko'pincha oddiy mexanik harakatlar uchun ishlatiladi:
- Robotning tor ko'rish maydonida masofani o'lchash uchun masofa o'lchagichni yoki boshqa sensorlarni ma'lum bir burchakka aylantiring.
- Oyog'ingiz bilan kichik qadam tashlang, oyoq-qo'lingizni yoki boshingizni harakatlantiring.
- Robot manipulyatorlarini yaratish.
- Rulda mexanizmini amalga oshirish uchun.
- Eshik, qopqoq yoki boshqa narsalarni oching yoki yoping.
Albatta, haqiqiy loyihalarda servoni qo'llash doirasi ancha kengroq, ammo keltirilgan misollar eng mashhur sxemalardir.
Servolarning sxemasi va turlari

Servo drayverning ishlash printsipi bir yoki bir nechta tizim signallarining fikr-mulohazalariga asoslanadi. Chiqish indikatori kirishga beriladi, bu erda uning qiymati sozlash harakati bilan taqqoslanadi va kerakli harakatlar amalga oshiriladi - masalan, vosita o'chiriladi. Amalga oshirishning eng oddiy varianti o'zgaruvchan rezistor bo'lib, u mil tomonidan boshqariladi - rezistorning parametrlari o'zgarganda, dvigatelni ta'minlaydigan oqim parametrlari o'zgaradi.
Haqiqiy servolarda boshqaruv mexanizmi ancha murakkab va o'rnatilgan kontroller chiplaridan foydalanadi. Amaldagi qayta aloqa mexanizmining turiga qarab, mavjud analog Va raqamli servolar. Birinchisi potansiyometrga o'xshash narsani ishlatsa, ikkinchisi kontrollerlardan foydalanadi.
 Butun servo boshqaruv sxemasi korpus ichida joylashgan, boshqaruv signallari va quvvat, qoida tariqasida, uchta sim orqali ta'minlanadi: tuproq, besleme zo'riqishida va boshqaruv signali.
Butun servo boshqaruv sxemasi korpus ichida joylashgan, boshqaruv signallari va quvvat, qoida tariqasida, uchta sim orqali ta'minlanadi: tuproq, besleme zo'riqishida va boshqaruv signali.
Uzluksiz aylanish servo 360, 180 va 270 daraja
Servomotorlarning ikkita asosiy turi mavjud - doimiy aylanish va qattiq burchak bilan (ko'pincha 180 yoki 270 daraja). Servo cheklangan aylanish o'rtasidagi farq parametrlar tomonidan belgilangan burchaklardan tashqarida milning harakatini blokirovka qilishi mumkin bo'lgan dizaynning mexanik elementlarida yotadi. 180 burchakka erishgandan so'ng, mil cheklovchiga ta'sir qiladi va u dvigatelni o'chirish buyrug'ini beradi. Uzluksiz aylanish servomotorlarida bunday cheklovchilar mavjud emas.
Servo tishli materiallar
Aksariyat servolar uchun mil va tashqi elementlar orasidagi bog'lovchi tishli bo'lib, shuning uchun u qanday materialdan tayyorlanganligi juda muhimdir. Ikkita eng maqbul variant mavjud: metall yoki plastik viteslar. Qimmatroq modellarda siz uglerod tolasi va hatto titandan tayyorlangan elementlarni topishingiz mumkin.


Plastik variantlar tabiiy ravishda arzonroq, ishlab chiqarish osonroq va ko'pincha arzon servolarda qo'llaniladi. Servo bir nechta harakatlarni amalga oshiradigan ta'lim loyihalari uchun bu katta ish emas. Ammo jiddiy loyihalarda bunday viteslarning yuk ostida juda tez aşınması tufayli plastmassadan foydalanish mumkin emas.
 Metall uzatmalar ishonchliroq, ammo bu, albatta, modelning narxiga ham, vazniga ham ta'sir qiladi. Tejamkor ishlab chiqaruvchilar ba'zi qismlarni plastmassadan va ba'zi metalldan yasashlari mumkin, buni ham yodda tutish kerak. Va, tabiiyki, eng arzon modellarda, hatto metall vitesning mavjudligi ham sifat kafolati emas.
Metall uzatmalar ishonchliroq, ammo bu, albatta, modelning narxiga ham, vazniga ham ta'sir qiladi. Tejamkor ishlab chiqaruvchilar ba'zi qismlarni plastmassadan va ba'zi metalldan yasashlari mumkin, buni ham yodda tutish kerak. Va, tabiiyki, eng arzon modellarda, hatto metall vitesning mavjudligi ham sifat kafolati emas.
Agar siz byudjet bilan cheklanmasangiz, titanium yoki uglerod viteslari eng maqbul variantdir. Yengil va ishonchli bunday servolar avtomobillar, dronlar va samolyotlar modellarini yaratishda keng qo'llaniladi.
Servo motorlarning afzalliklari
Servo uzatmalarning keng qo'llanilishi ularning barqaror ishlashi, shovqinlarga yuqori qarshilik, kichik o'lcham va tezlikni boshqarishning keng doirasiga ega ekanligi bilan bog'liq. Servolarning muhim xususiyatlari quvvatni oshirish va ma'lumotni qayta tiklash qobiliyatidir. Bundan kelib chiqadiki, oldinga yo'nalishda kontaktlarning zanglashiga olib keladigan energiya uzatuvchisi, teskari yo'nalishda esa boshqaruvning aniqligini oshirish uchun foydalaniladigan ma'lumot uzatuvchisi.
Servo va an'anaviy motor o'rtasidagi farqlar
An'anaviy elektr motorini yoqish yoki o'chirish orqali biz aylanish harakatini hosil qilishimiz va milga biriktirilgan g'ildiraklar yoki boshqa narsalarni harakatga keltirishimiz mumkin. Bu harakat uzluksiz bo'ladi, lekin milning qaysi burchakka burilganini yoki qancha inqilob qilganini tushunish uchun siz qo'shimcha tashqi elementlarni o'rnatishingiz kerak bo'ladi: enkoderlar. Servo haydovchi joriy aylanish parametrlari haqida ma'lumot olish uchun zarur bo'lgan hamma narsani o'z ichiga oladi va mil kerakli burchakka aylanganda mustaqil ravishda o'chirilishi mumkin.
Servo va step motor o'rtasidagi farqlar
 Servo vosita va step vosita o'rtasidagi muhim farq yuqori tezlashtirish va o'zgaruvchan yuk ostida ishlash qobiliyatidir. Bundan tashqari, servo motorlar yuqori quvvatga ega. Step motorlarda teskari aloqa yo'q, shuning uchun qadamlarning yo'qolishi ta'siri kuzatilishi mumkin, servomotorlarda qadamlarning yo'qolishi istisno qilinadi - barcha buzilishlar qayd etiladi va tuzatiladi. Bu barcha aniq afzalliklarga ega bo'lgan holda, servomotorlar step motorlariga qaraganda qimmatroq qurilmalar bo'lib, yanada murakkab ulanish va boshqarish tizimiga ega va ko'proq malakali texnik xizmat ko'rsatishni talab qiladi. Shuni ta'kidlash kerakki, step motorlar va servolar to'g'ridan-to'g'ri raqobatchilar emas - bu qurilmalarning har biri o'ziga xos qo'llanish sohasiga ega.
Servo vosita va step vosita o'rtasidagi muhim farq yuqori tezlashtirish va o'zgaruvchan yuk ostida ishlash qobiliyatidir. Bundan tashqari, servo motorlar yuqori quvvatga ega. Step motorlarda teskari aloqa yo'q, shuning uchun qadamlarning yo'qolishi ta'siri kuzatilishi mumkin, servomotorlarda qadamlarning yo'qolishi istisno qilinadi - barcha buzilishlar qayd etiladi va tuzatiladi. Bu barcha aniq afzalliklarga ega bo'lgan holda, servomotorlar step motorlariga qaraganda qimmatroq qurilmalar bo'lib, yanada murakkab ulanish va boshqarish tizimiga ega va ko'proq malakali texnik xizmat ko'rsatishni talab qiladi. Shuni ta'kidlash kerakki, step motorlar va servolar to'g'ridan-to'g'ri raqobatchilar emas - bu qurilmalarning har biri o'ziga xos qo'llanish sohasiga ega.
SG90, MG995, MG996 mashhur servolarini qayerdan sotib olish mumkin
 Eng arzon servo varianti SG90 1,6KG Eng arzon servo varianti SG90 1,6KG
|
 Servo Arduino uchun SG90 va MG90S ni 70 rubldan past narxda boshqaradi Servo Arduino uchun SG90 va MG90S ni 70 rubldan past narxda boshqaradi
|
 Alida ishonchli yetkazib beruvchidan SG90 Pro 9g servo uchun yana bir variant Alida ishonchli yetkazib beruvchidan SG90 Pro 9g servo uchun yana bir variant
|
 Ishonchli yetkazib beruvchi RobotDyn dan Servo SG90 Ishonchli yetkazib beruvchi RobotDyn dan Servo SG90
|
 Servo sinov qurilmasi Servo sinov qurilmasi
|
 Servo testerlar uchun bir nechta variant Servo testerlar uchun bir nechta variant
|
 15 kg moment bilan himoyalangan servo haydovchi 15 kg moment bilan himoyalangan servo haydovchi
|
 Servo JX DC5821LV 21KG to'liq suv o'tkazmaydigan yadro aqliy tishli 1/8 1/10 RC avtomobil Scaler Buggy Crawler TRAXXAS RC4WD TRX-4 SCX10 D90 Servo JX DC5821LV 21KG to'liq suv o'tkazmaydigan yadro aqliy tishli 1/8 1/10 RC avtomobil Scaler Buggy Crawler TRAXXAS RC4WD TRX-4 SCX10 D90
|
 Futaba JR uchun Servo MG996R MG996 Servo Metall Gear Futaba JR uchun Servo MG996R MG996 Servo Metall Gear
|
 Servo 13KG 15KG Servolar Digital MG995 MG996 MG996R Servo Metall Gear Servo 13KG 15KG Servolar Digital MG995 MG996 MG996R Servo Metall Gear
|
 Servo drayverlarni boshqarishda hal qiluvchi omil doimiy chastotali va o'zgaruvchan kenglikdagi impulslardan iborat bo'lgan nazorat signalidir. Puls uzunligi servoning holatini belgilovchi eng muhim parametrlardan biridir. Bu uzunlik burchakni tanlash usuli yoki kutubxona buyruqlari yordamida dasturda qo'lda o'rnatilishi mumkin. Qurilmaning har bir markasi uchun uzunlik boshqacha bo'lishi mumkin.
Servo drayverlarni boshqarishda hal qiluvchi omil doimiy chastotali va o'zgaruvchan kenglikdagi impulslardan iborat bo'lgan nazorat signalidir. Puls uzunligi servoning holatini belgilovchi eng muhim parametrlardan biridir. Bu uzunlik burchakni tanlash usuli yoki kutubxona buyruqlari yordamida dasturda qo'lda o'rnatilishi mumkin. Qurilmaning har bir markasi uchun uzunlik boshqacha bo'lishi mumkin.
Signal nazorat qilish pallasiga kirganda, generator o'z pulsini etkazib beradi, uning davomiyligi potansiyometr yordamida aniqlanadi. Sxemaning boshqa qismida qo'llaniladigan signalning davomiyligi va generatordan keladigan signal solishtiriladi. Agar bu signallar davomiyligi boshqacha bo'lsa, elektr motori yoqiladi, uning aylanish yo'nalishi impulslarning qaysi biri qisqaroq ekanligi bilan belgilanadi. Impuls uzunligi teng bo'lganda, vosita to'xtaydi.
 Impulslar beriladigan standart chastota 50 Gts, ya'ni har 20 millisekundda 1 impuls. Ushbu qiymatlarda davomiylik 1520 mikrosekundni tashkil qiladi va servo o'rta holatda. Impuls uzunligini o'zgartirish servo haydovchining aylanishiga olib keladi - muddat oshganda, aylanish soat yo'nalishi bo'yicha, kamayganda esa soat sohasi farqli ravishda aylantiriladi. Davomiylik chegaralari mavjud - Arduino-da Servo kutubxonasida, 0 ° uchun impuls qiymati 544 mks (pastki chegara), 180 ° - 2400 ms (yuqori chegara) uchun o'rnatiladi.
Impulslar beriladigan standart chastota 50 Gts, ya'ni har 20 millisekundda 1 impuls. Ushbu qiymatlarda davomiylik 1520 mikrosekundni tashkil qiladi va servo o'rta holatda. Impuls uzunligini o'zgartirish servo haydovchining aylanishiga olib keladi - muddat oshganda, aylanish soat yo'nalishi bo'yicha, kamayganda esa soat sohasi farqli ravishda aylantiriladi. Davomiylik chegaralari mavjud - Arduino-da Servo kutubxonasida, 0 ° uchun impuls qiymati 544 mks (pastki chegara), 180 ° - 2400 ms (yuqori chegara) uchun o'rnatiladi.

(Rasm amperka.ru saytidan foydalanilgan)
Muayyan qurilmada sozlamalar umumiy qabul qilingan qiymatlardan biroz farq qilishi mumkinligini hisobga olish kerak. Ba'zi qurilmalar uchun pulsning o'rtacha holati va kengligi 760 mks bo'lishi mumkin. Barcha qabul qilingan qiymatlar, shuningdek, qurilmani ishlab chiqarishda yuzaga kelishi mumkin bo'lgan xatolar tufayli biroz farq qilishi mumkin.
Drayvni boshqarish usuli ko'pincha noto'g'ri PWM / PWM deb ataladi, ammo bu butunlay to'g'ri emas. Boshqarish to'g'ridan-to'g'ri puls uzunligiga bog'liq, ularning paydo bo'lish chastotasi unchalik muhim emas. 40 Gts va 60 Gts chastotalarda to'g'ri ishlash ta'minlanadi, faqat chastotaning kuchli pasayishi yoki oshishi yordam beradi. Agar keskin pasayish bo'lsa, servo haydovchi chayqalib ishlay boshlaydi, agar chastota 100 Gts dan oshsa, qurilma qizib ketishi mumkin. Shuning uchun uni PDM deb atash to'g'riroq.
Ichki interfeysga asoslanib, analog va raqamli servolarni ajratish mumkin. Hech qanday tashqi farqlar yo'q - barcha farqlar faqat ichki elektronikada. Analog servo drayv ichida maxsus chip, raqamli servo diskda esa impulslarni qabul qiluvchi va tahlil qiluvchi mikroprotsessor mavjud.

Signalni qabul qilishda analog servo o'rnini o'zgartirish yoki o'zgartirmaslik to'g'risida qaror qabul qiladi va agar kerak bo'lsa, dvigatelga 50 Gts chastotali signal beradi. Reaktsiya vaqtida (20 ms) servo haydovchi o'rnini o'zgartiradigan tashqi ta'sirlar paydo bo'lishi mumkin va qurilma reaktsiyaga vaqt topa olmaydi. Raqamli servo haydovchi yuqori chastotada - 200 Gts dan signallarni etkazib beruvchi va qayta ishlaydigan protsessordan foydalanadi, shuning uchun u tashqi ta'sirlarga tezroq javob berishi va kerakli tezlik va momentni tezda ishlab chiqishi mumkin. Shu sababli, raqamli servo belgilangan pozitsiyani yaxshiroq ushlab turadi. Shu bilan birga, raqamli servo drayvlar ishlash uchun ko'proq elektr energiyasini talab qiladi, bu esa ularning narxini oshiradi. Ularni ishlab chiqarishning murakkabligi ham narxga katta hissa qo'shadi. Yuqori narx raqamli servolarning yagona kamchiliklari; texnik jihatdan ular analog qurilmalarga qaraganda ancha yaxshi.
Servo motorni Arduino-ga ulash
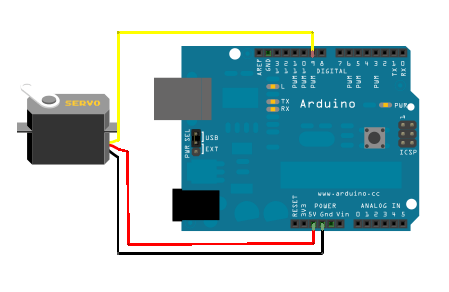
Servo haydovchi uchta kontaktga ega, ular turli xil ranglarda bo'yalgan. Jigarrang sim erga, qizil sim +5V quvvat manbaiga, to'q sariq yoki sariq sim esa signal simiga olib keladi. Qurilma Arduino-ga rasmda ko'rsatilgan tarzda non paneli orqali ulangan. To'q sariq sim (signal) raqamli pinga ulangan, qora va qizil simlar mos ravishda erga va quvvatga ulangan. Servomotorni boshqarish uchun siz shim pinlariga maxsus ulanishingiz shart emas - biz allaqachon servo boshqaruv printsipini tasvirlab bergan edik.
Kuchli servolarni to‘g‘ridan-to‘g‘ri plataga ulash tavsiya etilmaydi, chunki... ular Arduino elektr zanjiri uchun hayotga mos kelmaydigan oqim hosil qiladi - agar himoya ishlasa, omadingiz keladi. Ko'pincha, servoning haddan tashqari yuklanishi va noto'g'ri quvvat bilan ta'minlanishi belgilari servoning "chayqalishi", yoqimsiz ovoz va platani qayta ishga tushirishdir. Elektr ta'minoti uchun tashqi manbalardan foydalanish yaxshiroqdir, ikkita kontaktlarning zanglashiga olib kelishini unutmang.
Arduino-da servoni boshqarish uchun eskiz
Eskizdagi puls davomiyligini o'zgartirish orqali to'g'ridan-to'g'ri servoni boshqarish juda ahamiyatsiz vazifadir, ammo xayriyatki, bizda Arduino ishlab chiqish muhitiga o'rnatilgan ajoyib Servo kutubxonasi mavjud. Biz dasturlash va servolar bilan ishlashning barcha nuanslarini alohida maqolada ko'rib chiqamiz. Bu erda biz Servo-dan foydalanishning oddiy misolini keltiramiz.
Ishlash algoritmi oddiy:
- Avval biz Servo.h ni ulaymiz
- Servo sinfining ob'ektini yarating
- O'rnatish blokida biz servo qaysi pinga ulanganligini ko'rsatamiz
- Biz ob'ekt usullaridan odatiy C++ usulida foydalanamiz. Eng ommabop bu yozish usuli bo'lib, biz darajalarda butun sonni beramiz (360 servo uchun bu qiymatlar boshqacha talqin qilinadi).
Servo haydovchi bilan ishlash uchun oddiy eskizga misol
Loyihaning misoli, unda biz darhol servo motorni nol burchakka o'rnatamiz va keyin uni 90 daraja aylantiramiz.
#o'z ichiga oladi
Ikkita servo uchun eskiz
Va bu misolda biz bir vaqtning o'zida ikkita servo bilan ishlaymiz:
#o'z ichiga oladi
Potansiyometr yordamida servo nazorat
Ushbu misolda biz servoni potansiyometrdan olingan qiymatga qarab aylantiramiz. Biz qiymatni o'qiymiz va xarita funktsiyasidan foydalanib, uni burchakka aylantiramiz:
//Servo kutubxonasi void loop() ( val = analogRead(A0); // Potensiometr ulangan pindan qiymatni o'qish val = map(val, 0, 1023, 0, 180); // 0 dan 1023 gacha bo'lgan oraliqdagi raqamni yangi diapazonga - 0 dan 180 gacha o'zgartiring. servo.write(val); delay(15); )

SG-90 ning xususiyatlari va ulanishi
Agar siz eng arzon va eng oddiy servo drayverni sotib olmoqchi bo'lsangiz, u holda SG 90 eng yaxshi variant bo'ladi.Bu servo ko'pincha 0 ° dan 180 ° gacha aylanish burchagiga ega bo'lgan kichik, engil mexanizmlarni boshqarish uchun ishlatiladi.
SG90 texnik xususiyatlari:
- Buyruqni bajarish tezligi 0,12s/60 daraja;
- Quvvat 4,8 V;
- Ishlash harorati -30C dan 60C gacha;
- O'lchamlari 3,2 x 1,2 x 3 sm;
- Og'irligi 9 g.
Tavsif SG90
Sim ranglari standart hisoblanadi. Servo haydovchi arzon va boshlang'ich va oxirgi pozitsiyalar uchun aniq sozlamalarni ta'minlamaydi. 0 va 180 daraja holatida keraksiz ortiqcha yuklarni va xarakterli tirqish ovozini oldini olish uchun ekstremal nuqtalarni 10 ° va 170 ° ga qo'yish yaxshiroqdir. Qurilmani ishlatganda, besleme zo'riqishini kuzatish muhimdir. Agar bu ko'rsatkich juda yuqori baholansa, tishli mexanizmlarning mexanik elementlari shikastlanishi mumkin.
Servo MG995 va MG996 tower pro-ni boshqaradi
MG995 servo Arduino loyihalariga tez-tez ulangan ikkinchi eng mashhur servo modeldir. Bu SG90 ga qaraganda ancha yaxshi ishlashga ega nisbatan arzon servo motorlar.
Texnik xususiyatlari MG995
MG995-dagi chiqish mili 120 daraja (har bir yo'nalishda 60) aylanadi, garchi ko'plab sotuvchilar 180 darajani ko'rsatadi. Qurilma plastik qutiga joylashtirilgan.
- Og'irligi 55 g;
- Moment 8,5 kg x sm;
- Tezlik 0,2s/60 daraja (4,8V da);
- Ish kuchi 4,8 - 7,2 V;
- Ishlash harorati - 0C dan -55C gacha.
Tavsif MG995
Arduino-ga ulanish ham uchta sim orqali amalga oshiriladi. Aslida, havaskor loyihalar uchun MG995-ni to'g'ridan-to'g'ri Arduino-ga ulash mumkin, ammo dvigatel oqimi har doim plata kirishlarida xavfli yuk hosil qiladi, shuning uchun yerni ulashni unutmasdan, servoni alohida quvvatlantirish tavsiya etiladi. ikkala quvvat zanjirining. Hayotni osonlashtiradigan yana bir variant tayyor servo kontrollerlar va qalqonlardan foydalanish bo'ladi, biz ularni alohida maqolada ko'rib chiqamiz.
MG996R o'zining xarakteristikalari bo'yicha MG995 ga o'xshaydi, faqat u metall korpusda keladi.
Servo drayverni doimiy aylanish servosiga aylantirish
Yuqorida ta'riflanganidek, servo aylanish burchagini o'rnatadigan o'zgaruvchan kenglikdagi impulslar bilan boshqariladi. Joriy holat potentsiometrdan o'qiladi. Agar siz mil va potentsiometrni ajratib qo'ysangiz, servomotor o'rta nuqtadagi kabi potansiyometr slaydni o'rnini egallaydi. Bu harakatlarning barchasi fikr-mulohazalarni olib tashlashga olib keladi. Bu signal simi orqali aylanish tezligi va yo'nalishini nazorat qilish va uzluksiz aylanish servosini yaratish imkonini beradi. Shuni ta'kidlash kerakki, doimiy aylanish servosi ma'lum bir burchak ostida aylana olmaydi va qat'iy belgilangan miqdordagi aylanishlarni amalga oshira olmaydi.
Yuqoridagi amallarni bajarish uchun siz qurilmani qismlarga ajratishingiz va dizaynga o'zgartirishlar kiritishingiz kerak bo'ladi.
Arduino IDE-da siz rokerni o'rta holatga qo'yadigan kichik eskizni yaratishingiz kerak.
#o'z ichiga oladi
Shundan so'ng, qurilma Arduino-ga ulanishi kerak. Ulanganda servo aylana boshlaydi. Rezistorni sozlash orqali uning to'liq to'xtashiga erishish kerak. Aylanish to'xtatilgandan so'ng, siz milni topishingiz kerak, undan egiluvchan elementni tortib oling va uni qayta o'rnating.
Ushbu usulning bir nechta kamchiliklari bor - rezistorni to'liq to'xtatishga o'rnatish beqaror, eng kichik zarba/isitish/sovutish bilan sozlangan nol nuqtasi yo'qolishi mumkin. Shuning uchun potansiyometrni trimmer bilan almashtirish usulini qo'llash yaxshiroqdir. Buni amalga oshirish uchun siz potansiyometrni olib tashlashingiz va uni bir xil qarshilikka ega trimmer qarshiligi bilan almashtirishingiz kerak. Nol nuqtasi kalibrlash chizmasi yordamida sozlanishi kerak.
Servoni doimiy aylanish servosiga aylantirishning har qanday usuli o'zining kamchiliklariga ega. Birinchidan, nol nuqtasini sozlash qiyin, har qanday harakat uni tashlab yuborishi mumkin. Ikkinchidan, nazorat qilish diapazoni kichik - impuls kengligining kichik o'zgarishi bilan tezlik sezilarli darajada o'zgarishi mumkin. Arduino-da dasturli ravishda diapazonni kengaytirishingiz mumkin.
Xulosa
Servolar robototexnikadan tortib aqlli uy tizimlarigacha bo'lgan ko'plab Arduino loyihalarida juda muhim rol o'ynaydi. Harakat bilan bog'liq har bir narsa an'anaviy ravishda maxsus bilimlarni talab qiladi va to'liq huquqli, to'g'ri ishlaydigan haydovchini yaratish oson ish emas. Ammo servo motorlar yordamida vazifani ko'p hollarda soddalashtirish mumkin, shuning uchun servo doimiy ravishda hatto boshlang'ich darajadagi loyihalarda ham qo'llaniladi.
Ushbu maqolada biz Arduino loyihalarida servolardan foydalanishning turli jihatlarini yoritishga harakat qildik: ulanishdan tortib eskizlar yozishgacha. Eng oddiy servo modelni tanlab (masalan, sg 90) siz berilgan misollarni osongina takrorlashingiz va biror narsa harakatlanadigan va o'zgarib turadigan birinchi loyihalaringizni yaratishingiz mumkin. Umid qilamizki, ushbu maqola sizga bu borada yordam beradi.
Servolar odatda 180 daraja cheklangan aylanish burchagiga ega. Bunday holda, biz cheksiz eksa aylanish burchagi bilan "o'zgartirilgan" servoni ko'rib chiqamiz. 
Sotuvchi sahifasidan ishlash xususiyatlari
Hajmi: 40 * 20 * 37,5 + 5 mm haydovchi mili
vazn: 38 g
sim uzunligi: 320 mm
Tezlik: 0,19 sek/60 daraja (4,8 V)
0,22 soniya/60 daraja (6 V)
tezliklar, ehtimol, aralashtiriladi, servo 6 voltga tezroq bo'lishi kerak
moment: 5 kg. sm. da (4,8 V)
5,5kg.sm.da (6 V)
kuchlanish: 4.8V-6V
Standart yetkazib berish to'plami 
Har xil shakldagi 4 ta tebranadigan stullar
Servoni ulash uchun 4 ta vtulka, 4 ta rezina amortizator va 4 ta vint
va rokerni milga ulash uchun yana bir kichik vint fotosuratdan qochib ketdi :)
Tashqi ko'rinishi ishonchni uyg'otadi, teginish ham yaxshi, quyma kichik tirgaklar faqat o'rnatish quloqlari sohasida, stiker biroz egri qo'llaniladi (tavtologiya, ha!). Tel yumshoq, ulagich pinlarga yaxshi mos keladi. 
Xo'sh, endi otopsiya:
Bu qanday ishlashini kim bilmas edi: bu holda dvigatel, boshqaruv paneli va o'zgaruvchan rezistor mavjud bo'lib, ularning holatiga qarab servo o'qning burchagini aniqlaydi.
Ushbu servodagi vites qutisi plastik, xizmat muddati metalldan kamroq va og'ir yuklarni yoqtirmaydi. Markaziy o'q uchun burma mis yoki qandaydir qotishma hisoblanadi. Chiqish milida rulman mavjud. Yog'larni qo'shish mumkin 
Elektr qismi 

Aylanish yo'nalishi va tezligini, o'zgaruvchan tezlikni va elektr motorini boshqaradigan miyalar.
Va endi, diqqat, "hayotni buzish", oddiy servoni doimiy aylanish servosiga qanday aylantirish kerak 
Asl nusxada o'z o'qi bilan o'zgaruvchi servo ichidan chiqish miliga yopishtirilgan; o'zgartirilgan versiyada mil tishlab olingan / singan, ehtimol yig'ish bosqichida rezistor markaziy holatga o'rnatiladi, shunda mil tinch holatda aylanmaydi. Agar siz oldinga o'tsangiz, uni butunlay tashlab yuborishingiz va uni ikkita bir xil doimiy rezistor bilan almashtirishingiz mumkin, boshqaruv platasiga SMD narsasini qo'yish qulay.
Jami:
serva bo'sh joy emas, balki iste'mol tovarlari ham emas,
arzonroq va metall vites qutisi bilan topish mumkin
PS
Sharhlarda to'g'ri ta'kidlanganidek, men servo qanday boshqarilishini eslatib o'tishni butunlay unutib qo'ydim; servo uchinchi sim orqali 5-6 volt va ppm signali bilan ta'minlanadi.
Eng keng tarqalgan boshqaruv variantlari:
1) quvvatni bir tomondan, ikkinchi tomondan chiqishni 3 ta "iste'molchiga" (serverlar, motorlar va boshqalar) quvvat va PPM signaliga ulang, siz servo aylanish tezligi va yo'nalishini sozlash uchun tutqichdan foydalanishingiz mumkin.
2) Qabul qiluvchining chiqishlarida RC uskunasi bir xil ppm signalidir.
3) arduino bilan boshqaring
Video
Pps
"Modifikatsiya" natijasida servo qayta aloqani yo'qotdi, miya milning haqiqiy holatini va aylanish yo'nalishini bilmaydi, agar siz uni sotib olmoqchi bo'lsangiz, ushbu nuqtani hisobga oling.
Ushbu maqolada servolar ko'rib chiqiladi: ularning dizayni, maqsadi, ulash va boshqarish bo'yicha maslahatlar, servolar turlari va ularni taqqoslash. Keling, servo nima ekanligini bilib olaylik.
Servo tushunchasi
Servo haydovchi ko'pincha elektr motorli mexanizm sifatida tushuniladi, uni ma'lum bir burchakka burish va bu pozitsiyani ushlab turish so'ralishi mumkin. Biroq, bu to'liq to'liq ta'rif emas.
Aniqroq qilib aytadigan bo'lsak, servo haydovchi - bu harakat parametrlarini aniq nazorat qilish imkonini beruvchi salbiy teskari aloqa orqali boshqariladigan haydovchi. Servo haydovchi - bu sensor (joylashuv, tezlik, kuch va boshqalar) va ma'lum bir tashqi qiymatga muvofiq sensor va qurilmada zarur parametrlarni avtomatik ravishda saqlaydigan haydovchi boshqaruv blokini o'z ichiga olgan har qanday turdagi mexanik haydovchi.
Boshqa so'zlar bilan aytganda:
Servo haydovchi boshqaruv parametrining qiymatini kirish sifatida oladi. Masalan, burilish burchagi.
Tekshirish bloki bu qiymatni sensoridagi qiymat bilan taqqoslaydi.
Taqqoslash natijasiga asoslanib, haydovchi ba'zi harakatlarni amalga oshiradi: masalan, ichki sensordan olingan qiymat tashqi nazorat parametrining qiymatiga imkon qadar yaqin bo'lishi uchun burilish, tezlashtirish yoki sekinlashtirish.
Eng keng tarqalgani ma'lum bir burchakni ushlab turadigan servolar va ma'lum aylanish tezligini saqlaydigan servolardir.
Odatda sevimli mashg'ulot servosi quyida ko'rsatilgan.
Servolar qanday ishlab chiqilgan?
Servo haydovchi qurilma
Servo drayvlar bir nechta komponentlarga ega.

Drayv - vites qutisi bo'lgan elektr motor. Elektrni mexanik aylanishga aylantirish uchun sizga kerak elektr motor. Biroq, vosita aylanish tezligi ko'pincha amaliy foydalanish uchun juda yuqori. Tezlikni kamaytirish uchun ishlatiladi vites qutisi: momentni uzatuvchi va aylantiruvchi tishli mexanizm.
Elektr dvigatelini yoqish va o'chirish orqali biz chiqish milini - servoning oxirgi uzatmasini aylantira olamiz, unga biz nazorat qilmoqchi bo'lgan narsani biriktira olamiz. Biroq, pozitsiyani qurilma tomonidan nazorat qilish uchun bu kerak qayta aloqa sensori - kodlovchi, bu aylanish burchagini elektr signaliga aylantiradi. Buning uchun ko'pincha potansiyometr ishlatiladi. Potansiyometrning slayderini aylantirganda, uning qarshiligi aylanish burchagiga mutanosib ravishda o'zgaradi. Shunday qilib, u mexanizmning joriy holatini aniqlash uchun ishlatilishi mumkin.
Elektr dvigatel, vites qutisi va potansiyometrga qo'shimcha ravishda, servo haydovchi tashqi parametrni qabul qilish, potansiyometrdan qiymatlarni o'qish, ularni taqqoslash va dvigatelni yoqish / o'chirish uchun javobgar bo'lgan elektron qismlarga ega. U salbiy fikrlarni saqlash uchun javobgardir.
Servoga uchta sim bor. Ulardan ikkitasi dvigatelni quvvatlantirish uchun javobgardir, uchinchisi qurilmaning o'rnini o'rnatish uchun ishlatiladigan nazorat signalini beradi.
Keling, servoni tashqi tomondan qanday boshqarishni ko'rib chiqaylik.
Servo haydovchini boshqarish. Boshqarish signali interfeysi
Servomotorga kerakli pozitsiyani ko'rsatish uchun bu maqsad uchun taqdim etilgan sim bo'ylab nazorat signalini yuborish kerak. Tekshirish signali doimiy chastotali va o'zgaruvchan kenglikdagi impulslardir.

Servo qanday pozitsiyani egallashi pulslarning uzunligiga bog'liq. Signal boshqaruv pallasiga kirganda, unda mavjud bo'lgan impuls generatori o'z pulsini ishlab chiqaradi, uning davomiyligi potansiyometr orqali aniqlanadi. Devrenning boshqa qismi ikkita impulsning davomiyligini taqqoslaydi. Davomiyligi boshqacha bo'lsa, elektr motori yoqiladi. Aylanish yo'nalishi impulslarning qaysi biri qisqaroq ekanligi bilan belgilanadi. Impuls uzunligi teng bo'lsa, elektr motor to'xtaydi.
Ko'pincha hobbi serverlari 50 Gts chastotada impulslarni ishlab chiqaradi. Bu degani, impuls har 20 msda bir marta chiqariladi va qabul qilinadi. Odatda, 1520 mks impuls davomiyligi servo o'rta pozitsiyani egallashi kerakligini anglatadi. Puls uzunligini oshirish yoki kamaytirish servo mos ravishda soat yo'nalishi bo'yicha yoki soat miliga teskari burilishiga olib keladi. Bunday holda, pulsning davomiyligi bo'yicha yuqori va pastki chegaralar mavjud. Arduino uchun Servo kutubxonasida quyidagi impuls uzunliklari sukut bo'yicha o'rnatiladi: 0 ° uchun 544 mks va 180 ° uchun 2400 mks.
E'tibor bering, qurilmangizda standart zavod sozlamalari bo'lmasligi mumkin. Ba'zi servolar 760 mks impuls kengligidan foydalanadi. O'rta holat 760 mks ga to'g'ri keladi, xuddi an'anaviy servolarda o'rta holat 1520 mks ga to'g'ri keladi.
Shuni ham ta'kidlash kerakki, bular umumiy qabul qilingan uzunliklardir. Xuddi shu servo modelida ham, impuls uzunligining ish diapazoni biroz o'zgarishiga olib keladigan ishlab chiqarish tolerantliklari bo'lishi mumkin. To'g'ri ishlash uchun har bir o'ziga xos servo kalibrlangan bo'lishi kerak: tajriba orqali unga xos bo'lgan to'g'ri diapazonni tanlash kerak.
E'tibor berishga arziydigan yana bir narsa - terminologiyadagi chalkashlik. Ko'pincha servolarni boshqarish usuli PWM / PWM (Pulse Width Modulation) yoki PPM (Pulse Position Modulation) deb ataladi. Bu to'g'ri emas va bu usullardan foydalanish hatto haydovchiga zarar etkazishi mumkin. To'g'ri atama PDM (Pulse Duration Modulation). Unda impulslarning uzunligi juda muhim va ularning paydo bo'lish chastotasi unchalik muhim emas. 50 Gts normal, lekin servo 40 va 60 Gts da to'g'ri ishlaydi. Yodda tutishingiz kerak bo'lgan yagona narsa shundaki, agar chastota juda kamaysa, u chayqalib va kam quvvatda ishlashi mumkin, va agar chastota juda ko'paytirilsa (masalan, 100 Gts), u qizib ketishi va ishlamay qolishi mumkin.
Servo drayvning xususiyatlari
Keling, qanday turdagi servolar mavjudligini va ular qanday xususiyatlarga ega ekanligini aniqlaymiz.
Tork va aylanish tezligi
Avval servo haydovchining ikkita juda muhim xususiyati haqida gapiraylik: o moment va taxminan burilish tezligi.
Kuch momenti yoki moment - aylanish o'qidan kuch qo'llash nuqtasiga va bu kuchning vektoriga tortilgan radius vektorining mahsulotiga teng vektor jismoniy miqdor. Kuchning qattiq jismga aylanish harakatini xarakterlaydi.

Oddiy qilib aytganda, bu xususiyat servo ma'lum uzunlikdagi tutqichda dam olishda qanchalik og'ir yukni ushlab turishini ko'rsatadi. Agar servo haydovchining momenti 5 kg × sm bo'lsa, bu servo haydovchi gorizontal holatda 1 sm uzunlikdagi qo'lni ushlab turishini anglatadi, uning erkin uchida 5 kg osilgan. Yoki, teng ravishda, 5 sm uzunlikdagi tutqich, undan 1 kg osilgan.
Servo tezligi servo qo'lning 60 ° aylanishi uchun zarur bo'lgan vaqt bilan o'lchanadi. 0,1 s / 60 ° xarakteristikasi servoning 0,1 sekundda 60 ° aylanishini bildiradi. Undan tezlikni ko'proq tanish qiymatda, daqiqada aylanishlarni hisoblash oson, lekin shunday bo'ladiki, servolarni tavsiflashda bunday birlik ko'pincha ishlatiladi.
Shuni ta'kidlash kerakki, ba'zida bu ikki xususiyat o'rtasida o'zaro kelishuv mavjud, chunki agar biz ishonchli, og'ir yukga ega servoni xohlasak, biz bu qudratli blokning sekin aylanishiga tayyor bo'lishimiz kerak. Va agar biz juda tez haydashni xohlasak, uni muvozanat holatidan olib tashlash nisbatan oson bo'ladi. Xuddi shu dvigateldan foydalanganda muvozanat vites qutisidagi viteslarning konfiguratsiyasi bilan belgilanadi.
Albatta, biz har doim ko'proq quvvat sarflaydigan birlikni olishimiz mumkin, asosiysi uning xususiyatlari bizning ehtiyojlarimizga javob beradi.
Shakl omili
Servolar hajmi jihatidan farq qiladi. Va rasmiy tasnif bo'lmasa ham, ishlab chiqaruvchilar uzoq vaqtdan beri umumiy qabul qilingan mahkamlagichlar bilan bir nechta o'lchamlarga rioya qilishgan. Ularni quyidagilarga bo'lish mumkin:
kichik
standart
Ular quyidagi xarakterli o'lchamlarga ega:
Ushbu tasnifga kirmaydigan o'lchamlarga ega "maxsus turdagi" servolar ham mavjud, ammo bunday servolarning ulushi juda kichik.
Ichki interfeys
Servo drayvlar analog yoki raqamli. Xo'sh, ularning farqlari, afzalliklari va kamchiliklari qanday?
Tashqi tomondan, ular bir-biridan farq qilmaydi: elektr motorlar, vites qutilari, potansiyometrlar bir xil, ular faqat ichki boshqaruv elektronikasida farqlanadi. Maxsus analogli servo mikrosxema o'rniga uning raqamli hamkasbi platada impulslarni qabul qiladigan, ularni tahlil qiladigan va motorni boshqaradigan mikroprotsessorga ega. Shunday qilib, jismoniy dizaynda farq faqat impulslarni qayta ishlash va motorni boshqarish usulida bo'ladi.

Ikkala turdagi servo haydovchi bir xil boshqaruv pulslarini qabul qiladi. Shundan so'ng analog servo o'rnini o'zgartirish to'g'risida qaror qabul qiladi va agar kerak bo'lsa, dvigatelga signal yuboradi. Bu odatda 50 Gts chastotada sodir bo'ladi. Shunday qilib, biz 20 ms ni olamiz - minimal reaktsiya vaqti. Bu vaqtda har qanday tashqi ta'sir servo haydovchining holatini o'zgartirishi mumkin. Ammo bu yagona muammo emas. Dam olishda elektr motoriga kuchlanish qo'llanilmaydi, muvozanatdan ozgina og'ish bo'lsa, elektr motoriga qisqa quvvatli signal yuboriladi. Burilish qanchalik katta bo'lsa, signal kuchliroq bo'ladi. Shunday qilib, kichik og'ishlar bilan, servo haydovchi vositani tezda aylantira olmaydi yoki katta momentni rivojlantira olmaydi. "O'lik zonalar" vaqt va masofa bo'yicha shakllanadi.
Ushbu muammolarni qabul qilish chastotasini oshirish, signalni qayta ishlash va elektr motorini boshqarish orqali hal qilish mumkin. Raqamli servolar nazorat impulslarini qabul qiladigan, ularni qayta ishlaydigan va 200 Gts yoki undan ortiq chastotali dvigatelga signallarni yuboradigan maxsus protsessordan foydalanadi. Ma'lum bo'lishicha, raqamli servo haydovchi tashqi ta'sirlarga tezroq javob berishga, kerakli tezlik va momentni tezda ishlab chiqishga qodir, ya'ni ma'lum bir pozitsiyani ushlab turish yaxshidir, bu yaxshi. Albatta, u ham ko'proq elektr energiyasini iste'mol qiladi. Bundan tashqari, raqamli servolarni ishlab chiqarish qiyinroq va shuning uchun sezilarli darajada qimmatroq. Aslida, bu ikkita kamchilik raqamli servolarning barcha kamchiliklari. Texnik nuqtai nazardan, ular analog servolarni so'zsiz mag'lub qiladi.
Tishli materiallar
Servolar uchun viteslar turli materiallardan tayyorlanadi: plastmassa, uglerod, metall. Ularning barchasi keng qo'llaniladi, tanlov muayyan dasturga va o'rnatishda qanday xususiyatlar talab qilinishiga bog'liq.

Plastik, ko'pincha neylon, viteslar juda engil, aşınmaya tobe emas va servolarda eng keng tarqalgan. Ular og'ir yuklarga bardosh bera olmaydi, lekin agar yuklarning engil bo'lishi kutilsa, u holda neylon viteslar eng yaxshi tanlovdir.
Uglerodli uzatmalar bardoshli, amalda eskirmaydi va neylondan bir necha baravar kuchliroqdir. Asosiy kamchilik - bu yuqori narx.
Metall uzatmalar eng og'ir, ammo ular maksimal yuklarga bardosh bera oladi. Ular juda tez eskiradi, shuning uchun siz deyarli har mavsumda viteslarni o'zgartirishingiz kerak. Titan tishli uzatmalar texnik xususiyatlari va narxi bo'yicha metall uzatmalar orasida eng sevimli hisoblanadi. Afsuski, ular sizga juda qimmatga tushadi.
Cho'tkasi va cho'tkasi bo'lmagan motorlar
Servo motorlarning uch turi mavjud: oddiy yadroli vosita, yadrosiz vosita va cho'tkasiz vosita.

An'anaviy yadroli dvigatel (o'ngda) simli o'rash va uning atrofida magnitlangan zich temir rotorga ega. Rotorning bir nechta bo'limlari bor, shuning uchun vosita aylanayotganda, rotor bo'limlar magnitlardan o'tayotganda dvigatelning ozgina tebranishiga olib keladi, natijada tebranadigan servo paydo bo'ladi va yadrosiz motorli servoga qaraganda kamroq aniq bo'ladi. Bo'shliq rotorli vosita (chapda) magnit atrofida silindrli yoki qo'ng'iroq shaklidagi o'ralgan bitta magnit yadroga ega. Yadrosiz dizayn vazni engilroq va bo'limlari yo'q, natijada tezroq javob beradi va silliq, tebranishsiz ishlaydi. Ushbu motorlar qimmatroq, ammo ular standart bo'lganlarga nisbatan yuqori darajadagi nazorat, moment va tezlikni ta'minlaydi.

Cho'tkasiz motorli servo drayvlar nisbatan yaqinda paydo bo'ldi. Afzalliklar boshqa cho'tkasi bo'lmagan motorlarniki bilan bir xil: cho'tkalar yo'q, ya'ni ular aylanish qarshiligini yaratmaydi va eskirmaydi, tezlik va moment cho'tkasi bo'lgan motorlarga teng oqim iste'moli bilan yuqori. Cho'tkasiz motorli servolar eng qimmat servolardir, ammo ular boshqa turdagi motorli servolarga qaraganda yaxshiroq ishlashni taklif qiladi.
Arduino-ga ulanish
Ko'pgina servolar to'g'ridan-to'g'ri Arduino-ga ulanishi mumkin. Buning uchun ulardan uchta simli pastadir keladi:
qizil - ovqatlanish; 5V piniga yoki to'g'ridan-to'g'ri quvvat manbaiga ulanadi
jigarrang yoki qora - tuproq
sariq yoki oq - signal; Arduino raqamli chiqishiga ulanadi.
Arduino-ga ulanish uchun Troyka Shield kabi port kengaytiruvchi platadan foydalanish qulay bo'ladi. Garchi bir nechta qo'shimcha simlar bilan siz servoni non paneli orqali yoki to'g'ridan-to'g'ri Arduino pinlariga ulashingiz mumkin.
Nazorat impulslarini o'zingiz yaratishingiz mumkin, ammo bu shunday keng tarqalgan vazifaki, uni soddalashtirish uchun standart Servo kutubxonasi mavjud.
Oziqlanish cheklovlari
Oddiy hobbi servo haydovchi ish paytida 100 mA dan ortiq iste'mol qiladi. Shu bilan birga, Arduino 500 mA gacha etkazib berishga qodir. Shuning uchun, agar siz loyihada kuchli servo drayverni ishlatishingiz kerak bo'lsa, uni qo'shimcha quvvat bilan sxemaga ajratish haqida o'ylash mantiqan.
Keling, 12V servo drayverni ulash misolini ko'rib chiqaylik: 
Ulangan servolar sonining cheklanishi
Ko'pgina Arduino platalarida Servo kutubxonasi maksimal 12 ta servoni boshqarishni qo'llab-quvvatlaydi; Arduino Mega'da bu raqam 48 tagacha ko'tariladi. Biroq, bu kutubxonadan foydalanishning kichik yon ta'siri bor: agar siz Arduino Mega bilan ishlamayotgan bo'lsangiz. , keyin 9 va 10 pinlarda analogWrite() funksiyasidan servolar ushbu pinlarga ulanganmi yoki yo'qligidan qat'iy nazar foydalanish imkonsiz bo'lib qoladi. Arduino Mega-da biz PWM/PWM funksiyasini buzmasdan 12 tagacha servoni ulashimiz mumkin, agar biz ko'proq servolardan foydalansak, 11 va 12-pinlarda analogWrite() dan foydalana olmaymiz.
Servo kutubxona funksionalligi
Servo kutubxonasi servolarni dasturiy ta'minot bilan boshqarish imkonini beradi. Buning uchun Servo tipidagi o'zgaruvchi yaratiladi. Boshqaruv quyidagi funktsiyalar orqali amalga oshiriladi:
attach() - o'zgaruvchini ma'lum bir pinga biriktiradi. Bu funksiya uchun ikkita sintaksis varianti mavjud: servo.attach(pin) va servo.attach(pin, min, max) . Bunday holda, pin - bu servo haydovchi ulangan pinning soni, min va max - mikrosekundlarda impuls uzunligi, 0 ° va 180 ° aylanish burchaklari uchun javob beradi. Odatiy bo'lib, ular mos ravishda 544 mks va 2400 ms ga o'rnatiladi.
write() - servoga ba'zi parametr qiymatini qabul qilishni buyuradi. Sintaksis: servo.write (burchak) bu erda burchak - bu servo aylanishi kerak bo'lgan burchak.
writeMicroseconds() - ma'lum uzunlikdagi impulsni servo haydovchiga yuborish buyrug'ini beradi, bu avvalgi buyruqning past darajadagi analogidir. Sintaksis: servo.writeMicroseconds(uS) , bu erda uS mikrosekundlarda puls uzunligi.
read() - servo joylashgan burchakning joriy qiymatini o'qiydi. Sintaksis: servo.read() , 0 dan 180 gacha bo'lgan butun qiymatni qaytaradi.
attached() - o'zgaruvchining ma'lum bir pinga biriktirilganligini tekshiradi. Sintaksis quyidagicha: servo.attached() , agar o'zgaruvchi istalgan pinga biriktirilgan bo'lsa, mantiqiy rostni qaytaradi, aks holda noto'g'ri.
detach() - attach() ning qarama-qarshi harakatini bajaradi, ya'ni o'zgaruvchini o'zi tayinlangan pindan ajratadi. Sintaksis: servo.detach() .
Barcha Servo2 kutubxona usullari Servo usullari bilan bir xil.
Servo kutubxonasidan foydalanishga misol
Xulosa o'rniga
Servo drayvlar boshqacha, ba'zilari yaxshiroq - boshqalari arzonroq, ba'zilari ishonchli - boshqalari aniqroq. Va servo sotib olishdan oldin, u sizning loyihangiz uchun mos bo'lsa, u eng yaxshi xususiyatlarga ega bo'lmasligi mumkinligini yodda tutish kerak. Ishlaringizga omad!
Servo diskimizni qismlarga ajratish uchun bizga tornavida kerak. Chunki Men juda kichik servo diskni demontaj qilyapman, shuning uchun menga mos keladigan tornavida kerak. Shaxsan men arzon Xitoy to'plamidagi tornavidalardan foydalanaman. Men uni er osti o'tish joyidagi kioskda taxminan 5 dollarga sotib oldim, shuning uchun bu juda qimmat emas.
Servo drayverni ochish uchun siz faqat to'rtta vintni burishingiz kerak. Ular pastki qopqoqda joylashgan. Burang:

Qopqoqni olib tashlash orqali siz boshqaruv blokini tekshirishingiz mumkin. Tafsilotlarga kirmayman, baribir uni bu yerdan olib tashlayman. Bundan tashqari, ikkita sim o'tadigan motorni ham ko'rishingiz mumkin.

Yuqorida qopqoq ham bor, uni olib tashlaganingizdan so'ng siz vites qutisining viteslarini ko'rishingiz mumkin. Shuni ta'kidlash kerakki, ulardan ikkitasi potansiyometrga biriktirilgan - bu juda muhim, chunki vites qutisi o'z vazifasini bajarishda davom etishi uchun biz aslida potansiyometrni sindirishimiz kerak - biz uni shunchaki o'q sifatida ishlatamiz. viteslar.

Aslida, siz barcha viteslarni servo haydovchidan olib tashlashingiz va ularni bir muddat chetga surishingiz kerak. Biz potentsiometrni (aytmoqchi, u ham o'zgaruvchan rezistor) tornavida bilan servoning pastki qismidan ehtiyotkorlik bilan itarib, korpusdan chiqaramiz.

Endi, aslida, qaytib kelmaydigan vaqt keldi. Albatta, har doim hamma narsani bir-biriga lehimlash mumkin bo'ladi, lekin bu qiyinroq. Shunday qilib - potansiyometr tishlaydi.

Keyinchalik, xuddi shu usuldan foydalanib, biz boshqaruv platasini quvvat va signal simlari bilan ajratamiz.

Keyin biz simlarni motordan tishlaymiz. Bu erda ehtiyot bo'ling va dvigatelning o'zidan kontaktlarni tishlamang - agar ishonchingiz komil bo'lmasa, simni zaxira bilan qoldirish yaxshiroqdir. Keyin uni eritish mumkin. Men simni kontaktgacha tishlayman.


Keling, inventarizatsiya qilaylik.

Hammasi joyida ekan. Endi potentsiometrimizni olamiz.

Gap shundaki, endi u ham faqat ma'lum bir burchak ostida aylanadi. Va bu eksa bo'lgani uchun va unga eng katta tishli uzatma biriktirilgan bo'lib, biz aslida g'ildirakni keyinroq bog'laymiz, biz uning doimiy aylanishiga ishonch hosil qilishimiz kerak. Bunga to'sqinlik qiladigan ikkita metall plastinani chiqaramiz. Biz olamiz:

Umid qilamanki, fotosurat mening nima qilganimni ko'rsatadi. Men uni mayda pense bilan yirtib tashladim, chunki qo'lda mosroq narsa yo'q edi.
Endi siz vitesning o'zida cheklovchini kesib olishingiz kerak. Bu tishli qutining pastki qismidan chiqib ketishga o'xshaydi. Buni topish oson, u shunday ko'rinadi.

Biz uni kesib tashladik.

Va shundan so'ng siz vites qutisini korpusga qayta yig'ishni boshlashingiz mumkin. Biz potansiyometrdan ilgari yasagan o'qni orqaga qaytaramiz.

Keyinchalik, eng kichikidan boshlab, bir vaqtning o'zida bitta vites. Oxirgi vitesni o'rnatishda ehtiyot bo'ling - u oldingi potansiyometrning o'qiga maxsus biriktirilgan, chunki o'qning uchi harf shaklida qilingan. D. Ushbu protrusion vitesdagi chuqurchaga mos kelishi kerak. Quyidagi rasmga o'xshash narsa chiqadi.

Yuqori qopqoqni vites qutisiga qo'yamiz, shunda u keyingi ish paytida parchalanmaydi.

Xo'sh, ko'p narsa qolmadi. Biz simni taxtadan oldindan tishlab olgan ulagich bilan olamiz va undagi simlarni ajratamiz. Siz ularni uzoq masofaga ajratmasligingiz kerak, aslida bir santimetr etarli.

Biz ulardan ikkitasini tozalaymiz (asosan har qanday, lekin men qizil va yashil foydalanardim). Taxminan 3 mm izolyatsiyani kesish kifoya. Bizning maqsadlarimiz uchun - ko'proq.

Qolgan ajratilmagan simni bizga xalaqit bermasligi uchun shunchaki egamiz.

Keling, issiq narsalarga o'tamiz. Lehimlash temirini isitish vaqti keldi. Lehimlash temir qizdirilganda, men tutqichdagi servo haydovchini qulayroq qildim.


Biz qilishimiz kerak bo'lgan birinchi narsa - vosita kontaktlarida qolgan eski lehim qoldiqlarini olib tashlash. Men buni lehimli temir bilan kontaktni lehim eriydigan holatga qadar qizdirgandan so'ng, desolder nasosi yordamida qilaman. Bu erda asosiy narsa uni haddan tashqari oshirmaslikdir - dvigatelning orqa qopqog'i hali ham plastik va uzoq vaqt isinishni yoqtirmaydi. Jarayon quyidagicha ko'rinadi:


Men qilgan ishim unchalik sezilmasligini tushunaman, lekin kontaktlarda deyarli hech qanday lehim qolmagan, men xohlagan narsa.

DI HALTda lehimlash bo'yicha ajoyib maqolalar bor.U umuman daho, menimcha.Uning blogiga havola, lehimlashdan tashqari aslida juda ko'p narsalar bor, shunchaki qidirib ko'ring.
Muxtasar qilib aytganda, yaxshi lehim qilish uchun, avvalo, har doim eski lehimdan xalos bo'lishingiz kerak.
Lehimlash uchun ikkita sim qoldi. Lehimlash bilan tanish bo'lgan har bir kishi buni 5 soniya ichida qila oladi. Hayotimda ikkinchi marta lehim temirini olgan men kabi odam uchun bu biroz ko'proq vaqt talab etadi, lekin baribir - bu juda oddiy, hamma buni qila oladi.
Lehimlashda men oqimdan foydalanaman, bu, albatta, ishni ancha osonlashtiradi va u bilan lehim sifatini ta'minlash ancha oson. Shaxsan, yana DI HALTning maslahati bilan men uning blogida LTI-120 ga oshiq bo'lib qoldim.U menda cho'tka bilan shunday moda bankada bor.

To'rt vintni torting.

Hammasi shu, servo modifikatsiyasi tugadi. Servo drayverni tutqichga qulayroq va mahkamroq ulab, sinovni boshlashingiz mumkin.

Bu safar men kontrollerni yoqtirmayman, lekin shunchaki yashil va qizil simlarga quvvat manbaidan 5V kuchlanishni qo'llayman. Diqqat, videoda haydovchidan ancha baland ovoz eshitiladi.
Ko'rib turganingizdek, endi hech narsa bizning servomizning to'xtamasdan aylanishiga to'sqinlik qilmaydi. Drayv tomonidan ishlab chiqarilgan ovoz aslida jim emas, lekin printsipial jihatdan toqat qiladi. Bugun uchun hammasi shu bo'lsa kerak.







